#include "component.h"
#include "drawgeom.h"
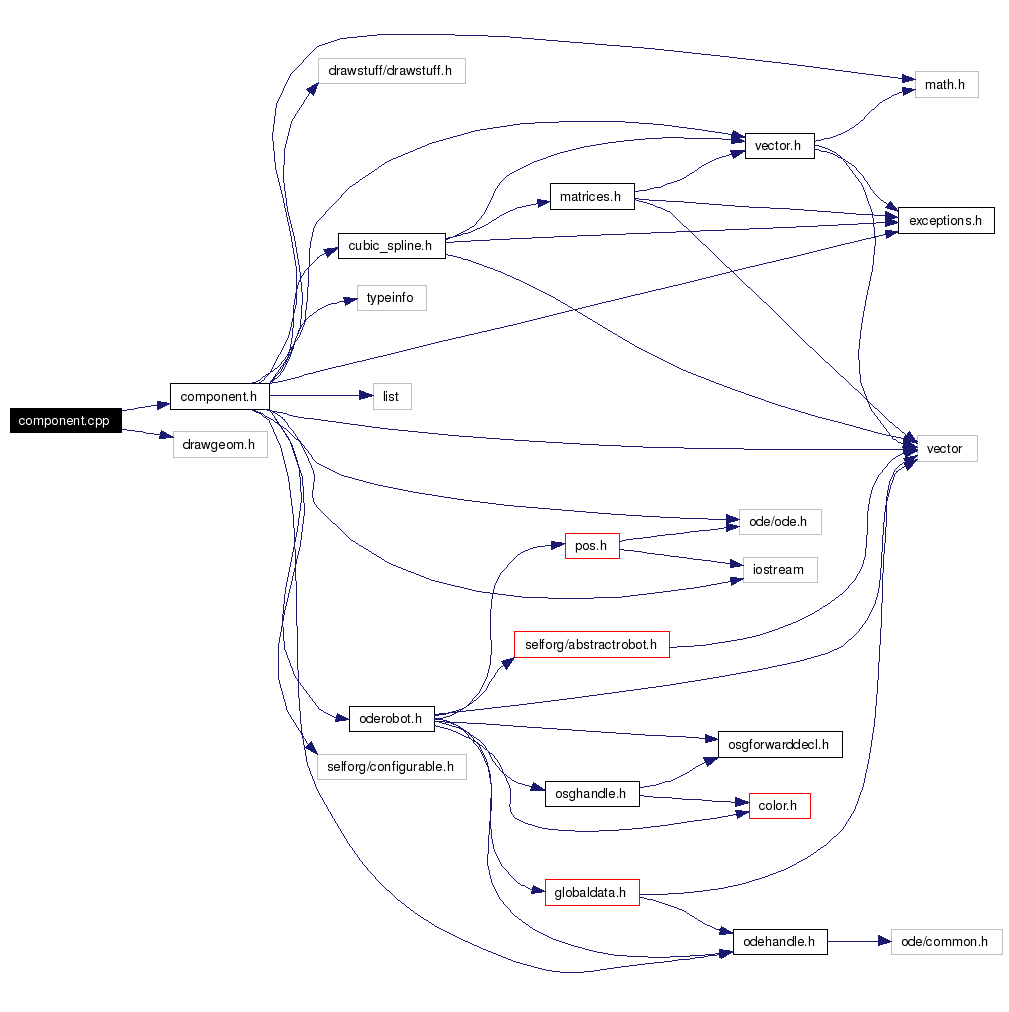
Include dependency graph for component.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | university_of_leipzig |
| namespace | university_of_leipzig::robots |
Functions | |
| OdeHandle | university_of_leipzig::robots::temp (NULL, NULL, NULL) |
| double | university_of_leipzig::robots::atan_ex (double x, double y) |
| atan_ex | |
| double | university_of_leipzig::robots::quat_mag (const dQuaternion q) |
| void | university_of_leipzig::robots::quat_norm (dQuaternion q) |
| void | university_of_leipzig::robots::quat_conj (dQuaternion q) |
| conjugate_quaternion | |
| void | university_of_leipzig::robots::quat_inv (dQuaternion q) |
| void | university_of_leipzig::robots::qv_mult (dVector3 v3_result, dQuaternion q, const dVector3 v3) |
| void | university_of_leipzig::robots::xxx_multiply (dVector3 v3_result, const dMatrix3 m33, const dVector3 v3) |
| multiply | |
| void | university_of_leipzig::robots::yyy_multiply (dVector3 v3_result, const dMatrix3 m33, const dVector3 v3) |
 1.4.5
1.4.5