#include <plattfussschlange.h>
Inherits SchlangeServo2.
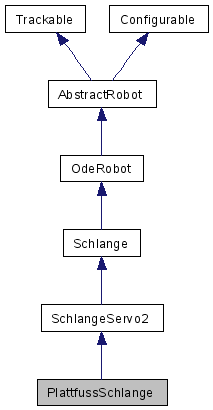
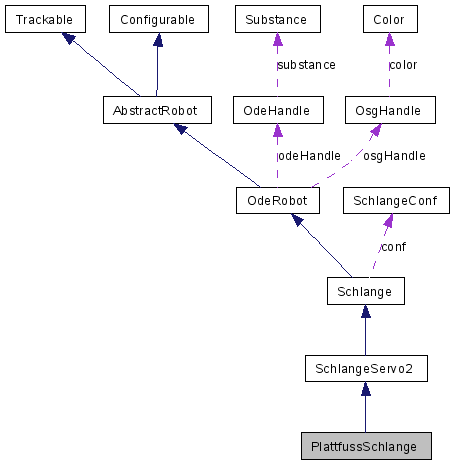
Inheritance diagram for PlattfussSchlange:
Public Member Functions | |
| PlattfussSchlange (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const SchlangeConf &conf, const std::string &name) | |
| virtual | ~PlattfussSchlange () |
It consists of a number of equal elements, each linked by a universal joint powered by 2 servos
| PlattfussSchlange | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| const SchlangeConf & | conf, | |||
| const std::string & | name | |||
| ) |
| ~PlattfussSchlange | ( | ) | [virtual] |
 1.4.7
1.4.7