#include <passivecapsule.h>
Inherits AbstractObstacle.
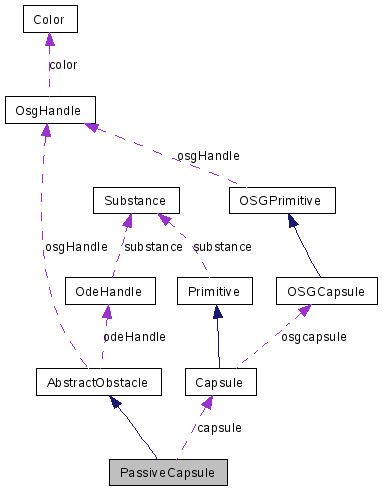
Inheritance diagram for PassiveCapsule:
Public Member Functions | |
| PassiveCapsule (const OdeHandle &odeHandle, const OsgHandle &osgHandle, float radius=1.0, float height=1.0, double mass=1.0) | |
| Constructor. | |
| ~PassiveCapsule () | |
| virtual void | update () |
| update position of box | |
| virtual void | setTexture (const std::string &filename) |
| virtual void | setPose (const osg::Matrix &pose) |
| sets position of the obstacle and creates/recreates obstacle if necessary | |
| virtual Primitive * | getMainPrimitive () const |
| return the "main" primitive of the obtactle. The meaning of "main" is arbitrary | |
Protected Member Functions | |
| virtual void | create () |
| overload this function to create the obstactle. All primitives should go into the list "obst" | |
| virtual void | destroy () |
| is called to destroy the object. The default implementation is to delete all primitives in "obst". | |
| PassiveCapsule | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| float | radius = 1.0, |
|||
| float | height = 1.0, |
|||
| double | mass = 1.0 | |||
| ) | [inline] |
Constructor.
| ~PassiveCapsule | ( | ) | [inline] |
| virtual void create | ( | ) | [inline, protected, virtual] |
overload this function to create the obstactle. All primitives should go into the list "obst"
Implements AbstractObstacle.
| virtual void destroy | ( | ) | [inline, protected, virtual] |
is called to destroy the object. The default implementation is to delete all primitives in "obst".
Reimplemented from AbstractObstacle.
| virtual Primitive* getMainPrimitive | ( | ) | const [inline, virtual] |
return the "main" primitive of the obtactle. The meaning of "main" is arbitrary
Implements AbstractObstacle.
| virtual void setPose | ( | const osg::Matrix & | pose | ) | [inline, virtual] |
sets position of the obstacle and creates/recreates obstacle if necessary
Implements AbstractObstacle.
| virtual void setTexture | ( | const std::string & | filename | ) | [inline, virtual] |
| virtual void update | ( | ) | [inline, virtual] |
 1.4.7
1.4.7