#include <oneaxisservo.h>
Inherits OneAxisServo.
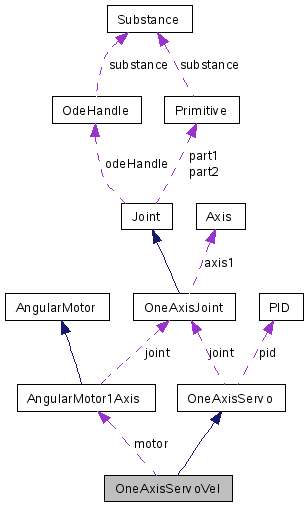
Inheritance diagram for OneAxisServoVel:
Public Member Functions | |
| OneAxisServoVel (const OdeHandle &odeHandle, OneAxisJoint *joint, double _min, double _max, double power, double damp=0.01, double maxVel=20, double jointLimit=1.3) | |
| min and max values are understood as travel bounds. | |
| virtual | ~OneAxisServoVel () |
| virtual void | setPower (double power) |
| adjusts the power of the servo | |
| virtual double | getPower () |
| returns the power of the servo | |
| virtual double & | offsetCanceling () |
| offetCanceling does not exist for this type of servo | |
| virtual void | setMaxVel (double maxVel) |
| adjusts maximal speed of servo | |
| virtual double | getMaxVel () |
| adjusts maximal speed of servo | |
| virtual void | set (double pos) |
| sets the set point of the servo. | |
| virtual double | get () |
| returns the position of the servo in ranges [-1, 1] (scaled by min, max, centered) | |
Protected Attributes | |
| AngularMotor1Axis | motor |
| double | dummy |
| OneAxisServoVel | ( | const OdeHandle & | odeHandle, | |
| OneAxisJoint * | joint, | |||
| double | _min, | |||
| double | _max, | |||
| double | power, | |||
| double | damp = 0.01, |
|||
| double | maxVel = 20, |
|||
| double | jointLimit = 1.3 | |||
| ) | [inline] |
min and max values are understood as travel bounds.
The zero position is max-min/2
| virtual ~OneAxisServoVel | ( | ) | [inline, virtual] |
| virtual double get | ( | ) | [inline, virtual] |
returns the position of the servo in ranges [-1, 1] (scaled by min, max, centered)
Reimplemented from OneAxisServo.
| virtual double getMaxVel | ( | ) | [inline, virtual] |
| virtual double getPower | ( | ) | [inline, virtual] |
| virtual double& offsetCanceling | ( | ) | [inline, virtual] |
| virtual void set | ( | double | pos | ) | [inline, virtual] |
sets the set point of the servo.
Position must be between -1 and 1. It is scaled to fit into min, max, however 0 is just in the center of min and max
Reimplemented from OneAxisServo.
| virtual void setMaxVel | ( | double | maxVel | ) | [inline, virtual] |
| virtual void setPower | ( | double | power | ) | [inline, virtual] |
double dummy [protected] |
AngularMotor1Axis motor [protected] |
 1.4.7
1.4.7