|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
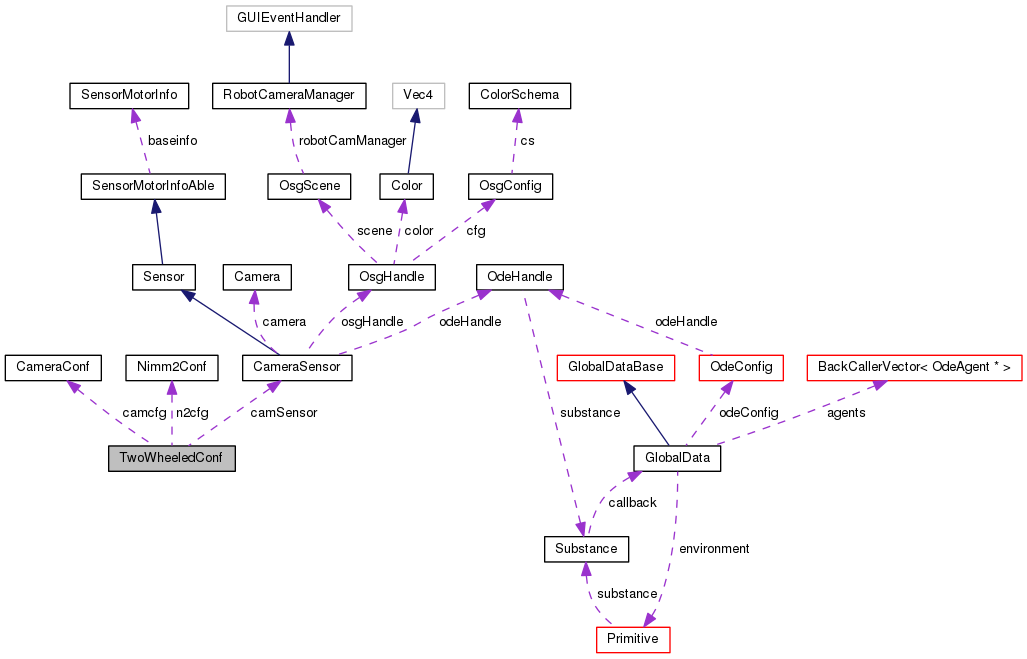
#include <twowheeled.h>
Public Member Functions | |
| void | addSensor (Sensor *s) |
| adds a sensor to the list of sensors More... | |
Public Attributes | |
| Nimm2Conf | n2cfg |
| configuration for underlying nimm2 robot More... | |
| CameraConf | camcfg |
| camera config. Allows to change the image processing More... | |
| bool | useCamera |
| whether to use the camera More... | |
| osg::Matrix | camPos |
| relative pose of the camera More... | |
| CameraSensor * | camSensor |
| camera sensor (converts image to sensor data) (if NULL then DirectCameraSensor() is used) More... | |
| std::list< Sensor * > | sensors |
| list of sensors that are mounted at the robot. (e.g. AxisOrientationSensor) More... | |
|
inline |
adds a sensor to the list of sensors
| CameraConf camcfg |
camera config. Allows to change the image processing
| osg::Matrix camPos |
relative pose of the camera
| CameraSensor* camSensor |
camera sensor (converts image to sensor data) (if NULL then DirectCameraSensor() is used)
| Nimm2Conf n2cfg |
configuration for underlying nimm2 robot
| std::list<Sensor*> sensors |
list of sensors that are mounted at the robot. (e.g. AxisOrientationSensor)
| bool useCamera |
whether to use the camera
 1.8.6
1.8.6 
