|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
Additional motors complementing the offer of ODE.
More...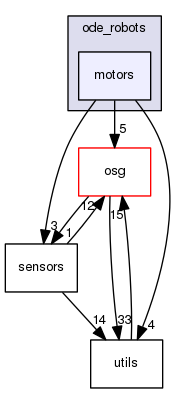
Files | |
| file | angularmotor.cpp |
| file | angularmotor.h [code] |
| file | constantmotor.h [code] |
| file | dummymotor.h [code] |
| file | motor.h [code] |
| file | oneaxisservo.cpp |
| file | oneaxisservo.h [code] |
| file | pid.cpp |
| file | pid.h [code] |
| file | ode_robots/motors/README |
| This file is used for the doxygen documentation. | |
| file | speaker.h [code] |
| file | spring.h [code] |
| file | twoaxisservo.cpp |
| file | twoaxisservo.h [code] |
Additional motors complementing the offer of ODE.
The servo for hinge joints and the servo for slider joints are derived from the class lpzrobots::PID.
 1.8.6
1.8.6 
