|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
The ode_robots directory provides all the stuff necessary for simulations with the physics engine ODE (http://ode.org).
More...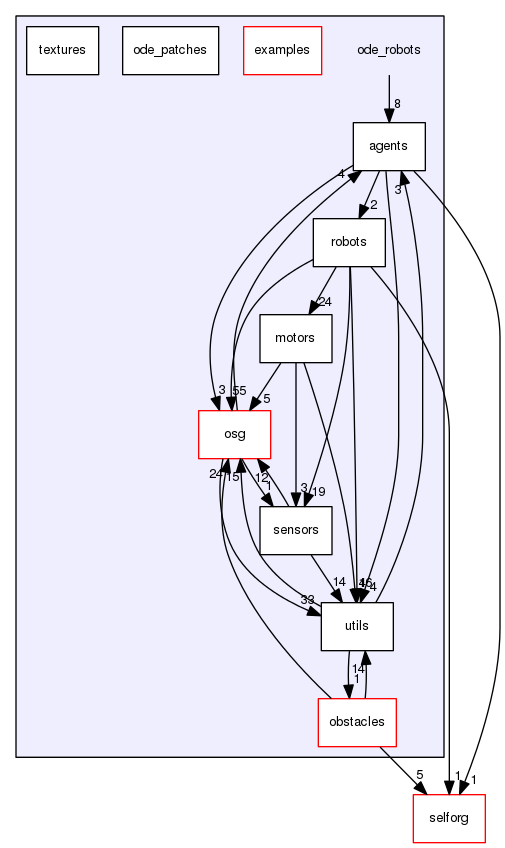
Directories | |
| directory | agents |
| directory | examples |
| directory | motors |
| Additional motors complementing the offer of ODE. | |
| directory | obstacles |
| Obstacles in our simulations are different kinds of boundaries, so called arenas or playgrounds. | |
| directory | ode_patches |
| Patches for ODE and drawstuff from the Leipzig Robot Group. | |
| directory | osg |
| The osg directory provides the osg primitves of which robots and obstacles are assembled and further helpful things dealing with the visualization in OSG. | |
| directory | robots |
| The robots of our simuated worlds "live" in this directory. | |
| directory | sensors |
| All sensors should be placed in this folder. | |
| directory | textures |
| The textures directory contains the different textures used in the simulations. | |
| directory | utils |
Files | |
| file | odeconfig.cpp |
| file | odeconfig.h [code] |
| file | ode_robots/README |
| This file is used for the doxygen documentation. | |
| file | simulation.cpp |
| file | simulation.h [code] |
The ode_robots directory provides all the stuff necessary for simulations with the physics engine ODE (http://ode.org).
The class OdeConfig holds the configurable parameters of the simulation environment like gravity, simStepSize, realTimeFactor and so on.
In the class Simulation you find the functions to overload like start and end which have to be overloaded by all simulations. Additionally you can overload functions like command to react on keystrokes, config for configuration purposes (rarely required) and some more.
The things inside the simulation environment (and some additional stuff) is inside the following subdirectories
To start a new project it is recommended to copy one of the existing simulations from ode_robots/simulations/ e.g. one of the "template" folders. To easy the procedure use the createNewSimulation.sh script in the simulations directory:
$> ./createNewSimulation.sh template_dir newsimname
where template_dir is the template directory you wish to copy and newsimname is the name of the new simulation you wish to create. This takes care of your installation type and other things like possible superficial CVS information.
Example:
cd ode_robots/simulations ./createNewSimulation.sh template_onerobot mysimulation
For user-type installation you probably want to put the simulation in a separate directory, that means:
./createNewSimulation.sh template_onerobot ~/path/to/simulations/mysimulation
Now you can adjust the simulation as you like. A simple make in the simulation directory should be enough. In case your simulation code consists of other files than main.cpp, please add them to FILES in the Makefile.conf in the simulation directory. You also have to run make depend afterwards!
If you insert a new file to the simulation framework, such as a new obstacle, robot or similar you DON'T need to add them anyvery. Every *.cpp file in the directories specified in Makefile.conf is compiled and included in the library libode_robots.a. In case you add a new directory with source files, which should be included in the lib, then add it to Makefile.conf. In any case run a make in the lpzrobots directory, this creates the neccessary dependency information to ensure a proper build.
ode_robots/robots, ode_robots/obstacles, and selforg/controller nimm4.cpp and nimm4.h myrobot.cpp, myrobot.hMyRobot <ode_robots/ > style. #include <ode_robots/primitives.h>
make depend  1.8.6
1.8.6 
