SchlangeServo2 Class Reference
This is a class, which models a snake like robot. More...
#include <schlangeservo2.h>
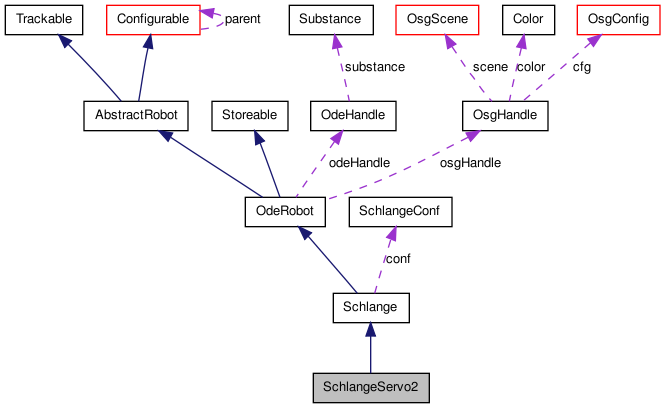
Inherits lpzrobots::Schlange.
Inherited by PlattfussSchlange.
Public Member Functions | |
| SchlangeServo2 (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const SchlangeConf &conf, const std::string &name, const std::string &revision="") | |
| virtual | ~SchlangeServo2 () |
| virtual void | setMotors (const motor *motors, int motornumber) |
| Reads the actual motor commands from an array, an sets all motors of the snake to this values. | |
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| Writes the sensor values to an array in the memory. | |
| virtual int | getSensorNumber () |
| returns number of sensors | |
| virtual int | getMotorNumber () |
| returns number of motors | |
| virtual void | notifyOnChange (const paramkey &key) |
| Is called when a parameter was changes via setParam(). | |
Detailed Description
This is a class, which models a snake like robot.
It consists of a number of equal elements, each linked by a joint powered by 2 servos
Constructor & Destructor Documentation
| SchlangeServo2 | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| const SchlangeConf & | conf, | |||
| const std::string & | name, | |||
| const std::string & | revision = "" | |||
| ) |
| ~SchlangeServo2 | ( | ) | [virtual] |
Member Function Documentation
| virtual int getMotorNumber | ( | ) | [inline, virtual] |
returns number of motors
Implements Schlange.
| virtual int getSensorNumber | ( | ) | [inline, virtual] |
returns number of sensors
Implements Schlange.
| int getSensors | ( | sensor * | sensors, | |
| int | sensornumber | |||
| ) | [virtual] |
Writes the sensor values to an array in the memory.
- Parameters:
-
sensors pointer to the array sensornumber length of the sensor array
- Returns:
- number of actually written sensors
- Parameters:
-
sensors pointer to the arrays sensornumber length of the sensor array
- Returns:
- number of actually written sensors
Implements Schlange.
| void notifyOnChange | ( | const paramkey & | key | ) | [virtual] |
Is called when a parameter was changes via setParam().
Note that it is not called of parameters of childs are changed, then there notifyOnChange() method is called. The key and of the changed parameter (use getParam() to retrieve its actual value). Overload this function when special actions have to be taken on parameter changes.
Reimplemented from Schlange.
| void setMotors | ( | const motor * | motors, | |
| int | motornumber | |||
| ) | [virtual] |
Reads the actual motor commands from an array, an sets all motors of the snake to this values.
Reads the actual motor commands from an array, an sets all motors (forces) of the snake to this values.
It is an linear allocation.
- Parameters:
-
motors pointer to the array, motor values are scaled to [-1,1] motornumber length of the motor array
Implements Schlange.
The documentation for this class was generated from the following files:
