One2OneWiring Class Reference
Implements one to one wiring of robot sensors to inputs of the controller and controller outputs to robot motors. More...
#include <one2onewiring.h>
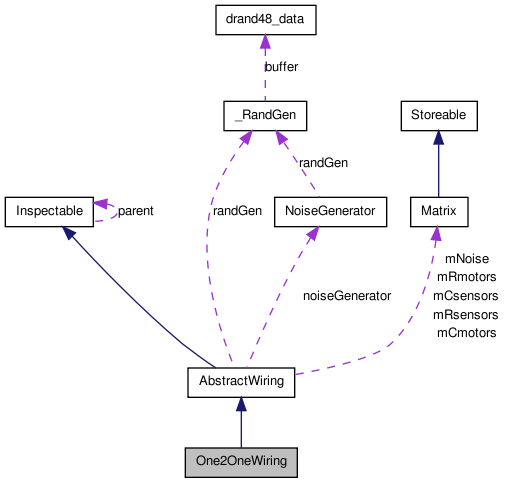
Inherits AbstractWiring.
Inherited by MotorNoiseWiring, SelectiveNoiseWiring, and SelectiveOne2OneWiring.
Public Member Functions | |
| One2OneWiring (NoiseGenerator *noise, int plotMode=Controller, int blind=0, const std::string &name="One2OneWiring") | |
| constructor | |
| virtual | ~One2OneWiring () |
| destructor | |
Protected Member Functions | |
| virtual bool | initIntern () |
| initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side | |
| virtual bool | wireSensorsIntern (const sensor *rsensors, int rsensornumber, sensor *csensors, int csensornumber, double noise) |
| Realizes one to one wiring from robot sensors to controller sensors. | |
| virtual bool | wireMotorsIntern (motor *rmotors, int rmotornumber, const motor *cmotors, int cmotornumber) |
| Realizes one to one wiring from controller motor outputs to robot motors. | |
Protected Attributes | |
| int | blind |
| motor * | blindmotors |
| number of blind channels | |
Detailed Description
Implements one to one wiring of robot sensors to inputs of the controller and controller outputs to robot motors.
- Examples:
Constructor & Destructor Documentation
| One2OneWiring | ( | NoiseGenerator * | noise, | |
| int | plotMode = Controller, |
|||
| int | blind = 0, |
|||
| const std::string & | name = "One2OneWiring" | |||
| ) |
constructor
- Parameters:
-
noise NoiseGenerator that is used for adding noise to sensor values plotMode see AbstractWiring blind number of blind channels (additional sensors and motors coupled directly)
| ~One2OneWiring | ( | ) | [virtual] |
destructor
Member Function Documentation
| bool initIntern | ( | ) | [protected, virtual] |
initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side
initializes the number of sensors and motors from robot, calculate
Implements AbstractWiring.
Reimplemented in MotorNoiseWiring, and SelectiveOne2OneWiring.
| bool wireMotorsIntern | ( | motor * | rmotors, | |
| int | rmotornumber, | |||
| const motor * | cmotors, | |||
| int | cmotornumber | |||
| ) | [protected, virtual] |
Realizes one to one wiring from controller motor outputs to robot motors.
- Parameters:
-
rmotors pointer to array of motorvalues for robot rmotornumber number of robot motors cmotors pointer to array of motorvalues from controller cmotornumber number of motorvalues from controller
Implements AbstractWiring.
Reimplemented in MotorNoiseWiring.
| bool wireSensorsIntern | ( | const sensor * | rsensors, | |
| int | rsensornumber, | |||
| sensor * | csensors, | |||
| int | csensornumber, | |||
| double | noise | |||
| ) | [protected, virtual] |
Realizes one to one wiring from robot sensors to controller sensors.
- Parameters:
-
rsensors pointer to array of sensorvalues from robot rsensornumber number of sensors from robot csensors pointer to array of sensorvalues for controller csensornumber number of sensors to controller noise size of the noise added to the sensors
Implements AbstractWiring.
Reimplemented in SelectiveNoiseWiring, and SelectiveOne2OneWiring.
Member Data Documentation
int blind [protected] |
motor* blindmotors [protected] |
number of blind channels
blind motor values
The documentation for this class was generated from the following files:
