MotorNoiseWiring Class Reference
Implements a one to one wiring that adds noise to the motor signals (the sensors will get no noise). More...
#include <motornoisewiring.h>
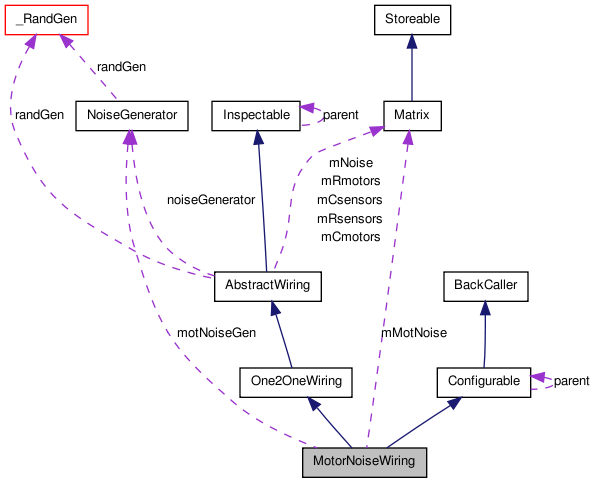
Inherits One2OneWiring, and Configurable.
Collaboration diagram for MotorNoiseWiring:
Public Member Functions | |
| MotorNoiseWiring (NoiseGenerator *noise, double noiseStrength) | |
| constructor | |
| virtual | ~MotorNoiseWiring () |
| double | getNoiseStrength () |
| void | setNoiseStrength (double _motNoiseStrength) |
| virtual bool | initIntern () |
| initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side | |
| virtual bool | wireMotorsIntern (motor *rmotors, int rmotornumber, const motor *cmotors, int cmotornumber) |
| Realizes one to one wiring from controller motor outputs to robot motors. | |
Protected Attributes | |
| NoiseGenerator * | motNoiseGen |
| double | motNoiseStrength |
| matrix::Matrix | mMotNoise |
Detailed Description
Implements a one to one wiring that adds noise to the motor signals (the sensors will get no noise).
Constructor & Destructor Documentation
| MotorNoiseWiring | ( | NoiseGenerator * | noise, | |
| double | noiseStrength | |||
| ) | [inline] |
constructor
- Parameters:
-
noise NoiseGenerator that is used for adding noise to motor values
| virtual ~MotorNoiseWiring | ( | ) | [inline, virtual] |
Member Function Documentation
| double getNoiseStrength | ( | ) | [inline] |
| virtual bool initIntern | ( | ) | [inline, virtual] |
initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side
initializes the number of sensors and motors from robot, calculate
Reimplemented from One2OneWiring.
| void setNoiseStrength | ( | double | _motNoiseStrength | ) | [inline] |
| virtual bool wireMotorsIntern | ( | motor * | rmotors, | |
| int | rmotornumber, | |||
| const motor * | cmotors, | |||
| int | cmotornumber | |||
| ) | [inline, virtual] |
Realizes one to one wiring from controller motor outputs to robot motors.
- Parameters:
-
rmotors pointer to array of motorvalues for robot rmotornumber number of robot motors cmotors pointer to array of motorvalues from controller cmotornumber number of motorvalues from controller
Reimplemented from One2OneWiring.
Member Data Documentation
matrix::Matrix mMotNoise [protected] |
NoiseGenerator* motNoiseGen [protected] |
double motNoiseStrength [protected] |
The documentation for this class was generated from the following file:
