SelectiveOne2OneWiring Class Reference
Implements a selective one to one wiring of robot sensors to inputs of the controller and controller outputs to robot motors. More...
#include <selectiveone2onewiring.h>
Inherits One2OneWiring.
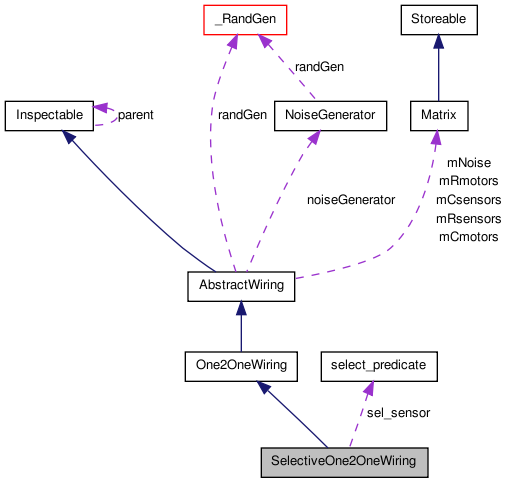
Collaboration diagram for SelectiveOne2OneWiring:
Public Member Functions | |
| SelectiveOne2OneWiring (NoiseGenerator *noise, select_predicate *sel_sensor, int plotMode=Controller, const std::string &name="SelectiveOne2OneWiring") | |
| constructor | |
| virtual | ~SelectiveOne2OneWiring () |
Protected Member Functions | |
| virtual bool | initIntern () |
| initializes the number of sensors and motors on robot side, calculate | |
| virtual bool | wireSensorsIntern (const sensor *rsensors, int rsensornumber, sensor *csensors, int csensornumber, double noise) |
| Realizes selective one to one wiring from robot sensors to controller sensors. | |
Protected Attributes | |
| select_predicate * | sel_sensor |
Detailed Description
Implements a selective one to one wiring of robot sensors to inputs of the controller and controller outputs to robot motors.
Constructor & Destructor Documentation
| SelectiveOne2OneWiring | ( | NoiseGenerator * | noise, | |
| select_predicate * | sel_sensor, | |||
| int | plotMode = Controller, |
|||
| const std::string & | name = "SelectiveOne2OneWiring" | |||
| ) |
constructor
- Parameters:
-
noise NoiseGenerator that is used for adding noise to sensor values sel_sensor binary predicate taking the index and the length (number of sensors) and decides which sensor to select
| ~SelectiveOne2OneWiring | ( | ) | [virtual] |
Member Function Documentation
| bool initIntern | ( | ) | [protected, virtual] |
initializes the number of sensors and motors on robot side, calculate
Reimplemented from One2OneWiring.
| bool wireSensorsIntern | ( | const sensor * | rsensors, | |
| int | rsensornumber, | |||
| sensor * | csensors, | |||
| int | csensornumber, | |||
| double | noise | |||
| ) | [protected, virtual] |
Realizes selective one to one wiring from robot sensors to controller sensors.
Reimplemented from One2OneWiring.
Member Data Documentation
select_predicate* sel_sensor [protected] |
The documentation for this class was generated from the following files:
