#include <controller.h>
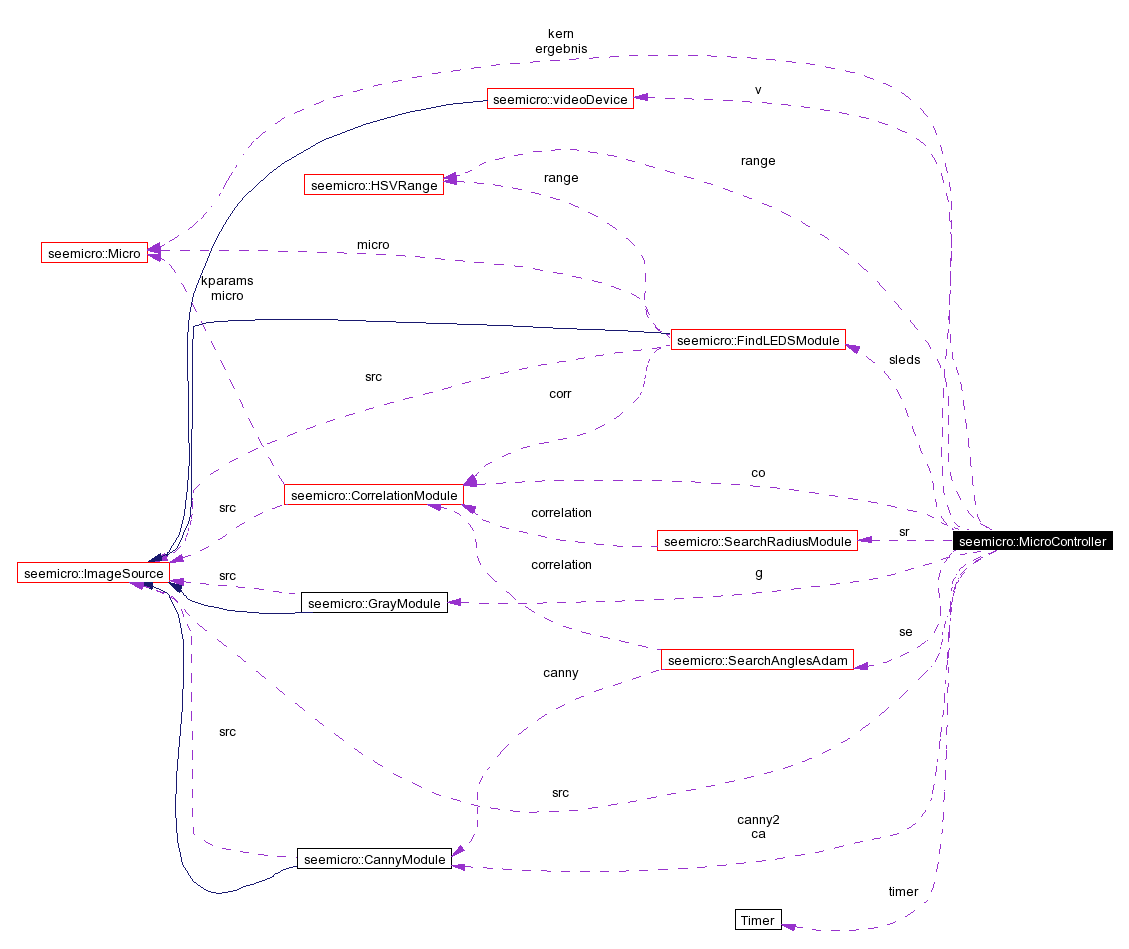
Zusammengehörigkeiten von seemicro::MicroController:
Öffentliche Methoden | |
| void | modulesProcessFrame (void) |
| void | modulesProcessKeyFrame (void) |
| void | callOutputModules (bool keyframe) |
| void | reEvalIfParamChanged (void) |
| void | handleFrame () |
| MicroController () | |
| MicroController (ImageSource *quelle, Micro *Amicro) | |
| ~MicroController () | |
Öffentliche Attribute | |
| Micro * | ergebnis |
| Micro * | kern |
| ImageSource * | src |
| videoDevice * | v |
| GrayModule * | g |
| CannyModule * | ca |
| CannyModule * | canny2 |
| CorrelationModule * | co |
| SearchRadiusModule * | sr |
| SearchAnglesAdam * | se |
| FindLEDSModule * | sleds |
| HSVRange * | range |
| list< RecognitionModule * > | frameRecognitionList |
| list< OutputModule * > | outputList |
| bool | keyframe |
| Timer | timer |
| long | timeForFrame |
| long | timeForKeyFrame |
| long | timeForFrameOut |
| long | timeForKeyFrameOut |
|
|
Alternativer Konstruktor zum Chainselberbauen. Es müssen src und ergebnis initialisiert werden, sowie module zur Erkennung und Ausgabe registriert werden. |
|
||||||||||||
|
|
|
|
Destroys things allocated with new |
|
|
|
|
|
Zuviele Logmeldungen brauchen viel Zeit, denn das Log-xterm wird häufig neu gezeichnet. Möglich sind 13 Frames/s auf einem 700MHz Athlon, bei paralleler Videowiedergabe mit MPlayer skaliert von 720x576 (Videodatei) auf 280x210 (Verarbeitung hier). |
|
|
|
|
|
|
|
|
Check für paramChanged/src.outputChanged könnte per default in processKeyFrame() erfolgen |
|
|
|
|
|
|
|
|
|
|
|
wird die erkannten Parameter enthalten |
|
|
Liste der Erkennungsmodule. Sie verwendet XModule* statt XModule, damit Polymorphismus funktioniert - Siehe B. Stroustrup "The C++ Programming Language" §12.2.6, S. 312 |
|
|
|
|
|
wird für Korrelation gebraucht |
|
|
Whether currently processed frame is a keyframe |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
NULL, wenn src nicht vom Typ videoDevice ist |
 1.3.2
1.3.2