#include <correlation.h>
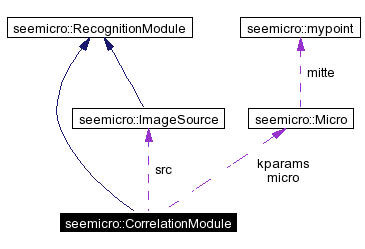
Klassendiagramm für seemicro::CorrelationModule:
Öffentliche Methoden | |
| CorrelationModule (Micro &m, ImageSource &As, Micro *Ak) | |
| void | makeKernel (void) |
| void | makeKernel (Micro &p) |
| void | processKeyFrame (void) |
| void | processFrame (myrect *ROI) |
| ~CorrelationModule () | |
Öffentliche Attribute | |
| Micro & | micro |
| float | correlationStrength |
| ImageSource & | src |
| Micro * | kparams |
| int | arm_auch |
| IplImage * | kernel_img |
| double * | ffin |
| double * | kernelin |
| double * | ffback |
| fftw_plan | plan |
| fftw_plan | plan_kernel |
| fftw_plan | planB |
| fftw_complex * | ffout |
| fftw_complex * | kernelout |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Keine Korrelation für normale Frames, da diese Operation so teuer ist Erneute Implementation von seemicro::RecognitionModule. |
|
|
Erneute Implementation von seemicro::RecognitionModule. |
|
|
Ob der Arm im Kern eingezeichnet werden soll, oder nicht. Eingeführt, weil bei alpha==0 Probleme auftraten (waagerechte Linien am Bildrand des Korrelationsbildes, die sich zu Maximas aufschwungen). Ist int statt bool, damit CorrelationOutput einen int* für eine Trackbar bekommen kann. |
|
|
Betrag der Korrelationsbildes an der Maximum-Stelle, die als Radposition angenommen wird. Wird von correlate() gesetzt. |
|
|
für fftw / Zwischenergebnisse |
|
|
für fftw / Zwischenergebnisse |
|
|
|
|
|
|
|
|
für fftw / Zwischenergebnisse |
|
|
|
|
|
Liefert die Parameter, mit denen der Kern gezeichnet wird. |
|
|
Ergebnisse (mitte, mitteValid) kommen dahin |
|
|
|
|
|
|
|
|
|
|
|
Referenz zum Kantensegmentbild |
 1.3.2
1.3.2