#include <searchanglesadam.h>
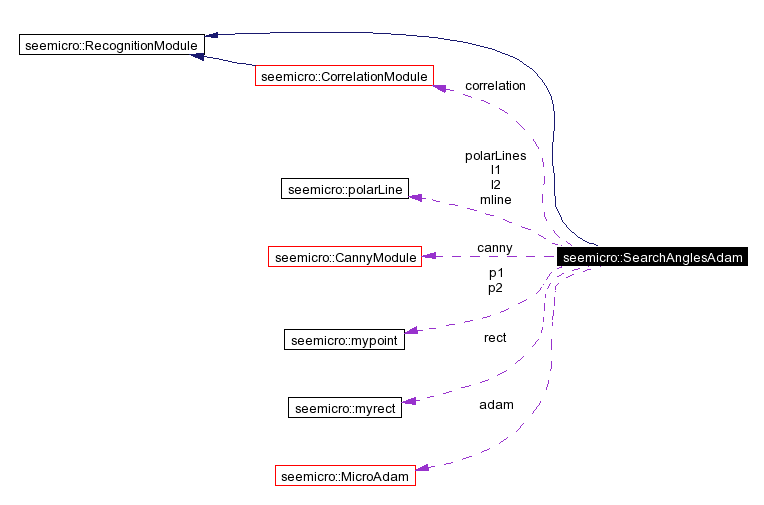
Klassendiagramm für seemicro::SearchAnglesAdam:
Öffentliche Methoden | |
| SearchAnglesAdam (MicroAdam &Am, CorrelationModule &Aco, CannyModule &Ac) | |
| ~SearchAnglesAdam () | |
| void | processFrame (myrect *ROI) |
| void | processKeyFrame (void) |
| int | searchAngles () |
Öffentliche Attribute | |
| MicroAdam & | adam |
| CannyModule & | canny |
| CorrelationModule & | correlation |
| CvMemStorage * | storage |
| CvSeq * | lines |
| polarLine | polarLines [MAXPL] |
| polarLine | l1 |
| polarLine | l2 |
| polarLine | mline |
| mypoint | p1 |
| mypoint | p2 |
| float | dr2 |
| myrect | rect |
| int | searchStatus |
| int | angres |
| int | distres |
| int | hough_threshold |
| int | houghMaxGap |
|
||||||||||||||||
|
|
|
|
|
|
|
Verarbeite ein Bild, das keinen Keyframe darstellt Erneute Implementation von seemicro::RecognitionModule. |
|
|
Erneute Implementation von seemicro::RecognitionModule. |
|
|
Takes inside of wheel by copying / masking out the rest then does hough transform to find main lines. Assumes adam.radius & adam.mitte are valid.
|
|
|
|
|
|
for hough transform: number of accumulator cells |
|
|
|
|
|
|
|
|
for hough transform: number of accumulator cells |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Saved return value of searchAngles(). Used by Output module to decide what to draw. |
|
|
Intermediate values of searchAngles(). storage: for hough lines |
 1.3.2
1.3.2