|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
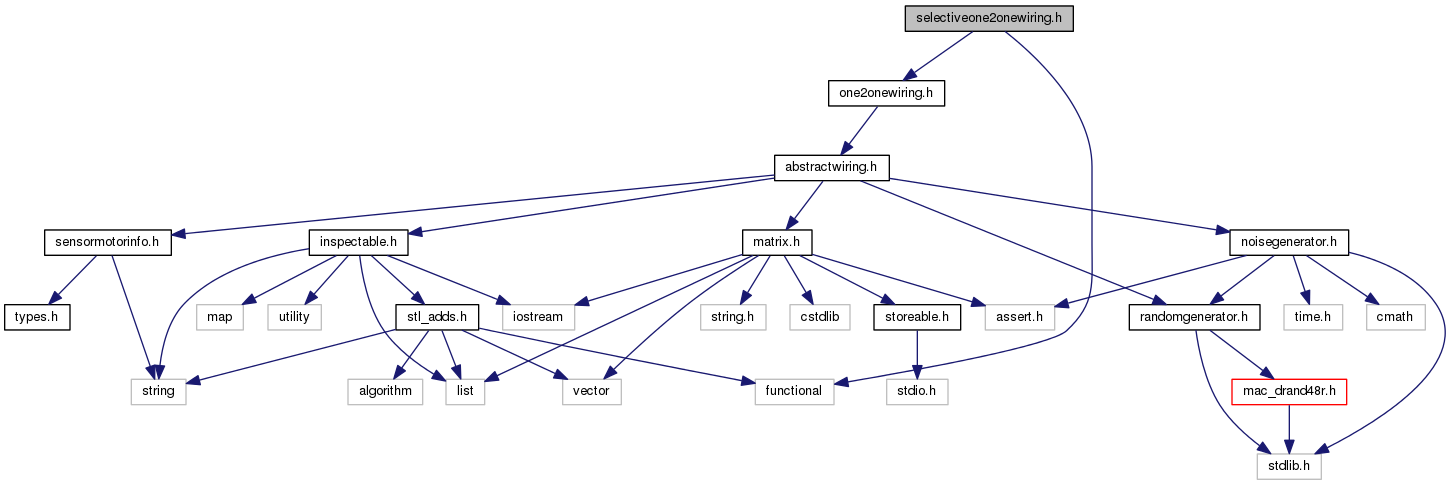
Go to the source code of this file.
Classes | |
| struct | select_predicate |
| predicate to select sensors. More... | |
| struct | select_all |
| struct | select_firsthalf |
| struct | select_from_to |
| select sensors in the range
(inclusively) More... | |
| class | SelectiveOne2OneWiring |
| Implements a selective one to one wiring of robot sensors to inputs of the controller and controller outputs to robot motors. More... | |
 1.8.6
1.8.6 

![\[ [from, to] \]](form_29.png)