|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
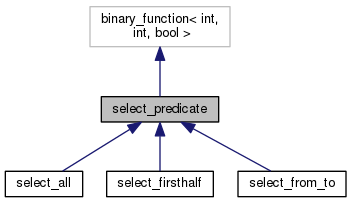
predicate to select sensors. More...
#include <selectiveone2onewiring.h>
Public Member Functions | |
| virtual | ~select_predicate () |
| virtual bool | operator() (int index, int len) |
predicate to select sensors.
First parameter is the index and the second parameter is the length (or number of sensors).
|
inlinevirtual |
|
inlinevirtual |
Reimplemented in select_from_to, and select_firsthalf.
 1.8.6
1.8.6 
