|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
#include <vector>#include <memory>#include <selforg/abstractrobot.h>#include <selforg/storeable.h>#include "odehandle.h"#include "osghandle.h"#include "sensor.h"#include "motor.h"#include "globaldata.h"#include "color.h"#include "pos.h"#include "osgforwarddecl.h"#include "tmpprimitive.h"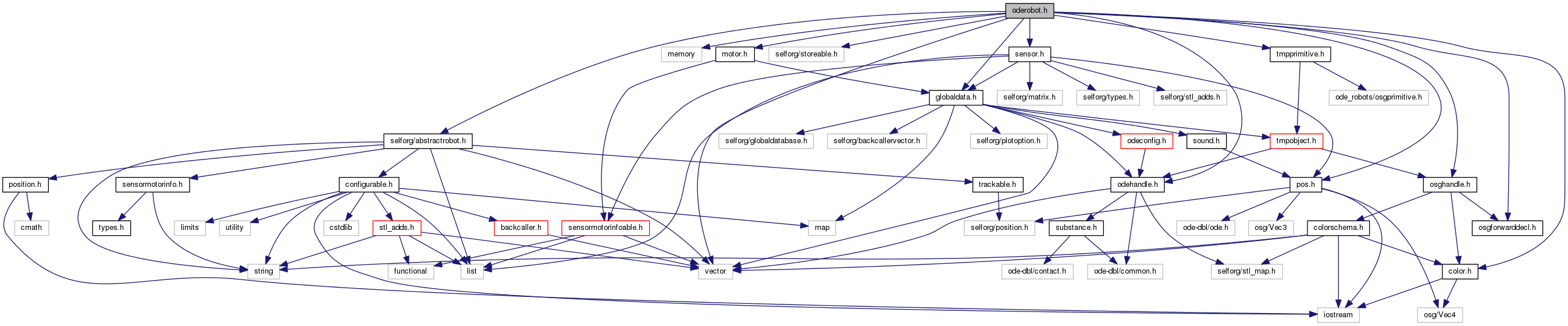

Go to the source code of this file.
Classes | |
| struct | Attachment |
| structure to hold attachment data for sensors and motors More... | |
| class | OdeRobot |
| Abstract class for ODE robots. More... | |
Namespaces | |
| lpzrobots | |
| forward declarations | |
Typedefs | |
| typedef std::vector< Primitive * > | Primitives |
| typedef std::vector< Joint * > | Joints |
| typedef std::pair < std::shared_ptr< Sensor > , Attachment > | SensorAttachment |
| typedef std::pair < std::shared_ptr< Motor > , Attachment > | MotorAttachment |
 1.8.6
1.8.6 
