|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
#include "oderobot.h"#include <selforg/configurable.h>#include "primitive.h"#include "joint.h"#include "angularmotor.h"#include "oneaxisservo.h"#include "osgforwarddecl.h"#include "axis.h"#include "irsensor.h"#include "raysensorbank.h"#include "raysensor.h"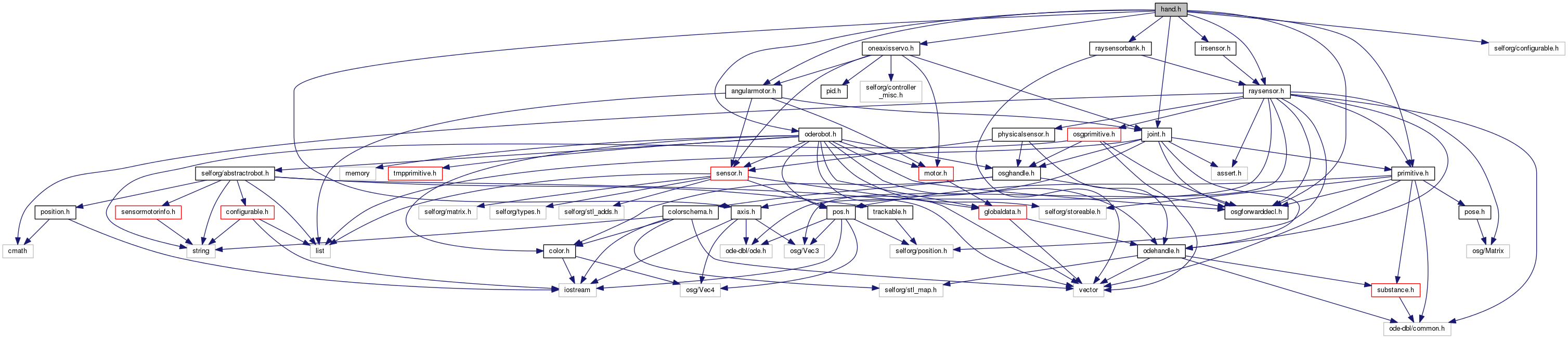
Go to the source code of this file.
Classes | |
| struct | HandConf |
| class | Hand |
| Artificial Hand. More... | |
Namespaces | |
| lpzrobots | |
| forward declarations | |
Enumerations | |
| enum | Motor_type { With_servo_motor, Without_servo_motor } |
| enum | IrSensor_Type { irDrawAll, irBack, irSide, irFront } |
| enum | GripMode { lateral, precision } |
 1.8.6
1.8.6 
