|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
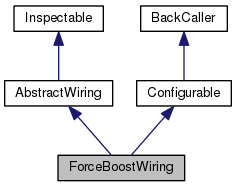
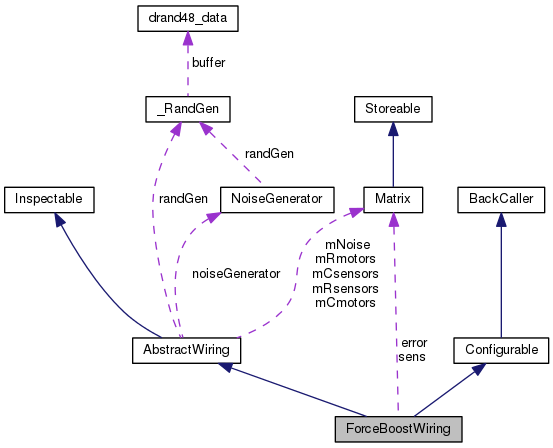
Implements one to one wiring that integrates the mismatch between motor commands (understood as target values) and sensor values and adds them to the controller output If more sensors than motors are used it uses just the first m sensors. More...
#include <forceboostwiring.h>
Public Member Functions | |
| ForceBoostWiring (NoiseGenerator *noise, double boost=0, bool exportBoostError=false, int plotMode=Controller, const std::string &name="ForceBoostWiring") | |
| constructor More... | |
| virtual | ~ForceBoostWiring () |
| destructor More... | |
| virtual void | reset () |
| reset internal state More... | |
 Public Member Functions inherited from AbstractWiring Public Member Functions inherited from AbstractWiring | |
| AbstractWiring (NoiseGenerator *noise, int plotMode=Controller, const std::string &name="AbstractWiring") | |
| constructor More... | |
| virtual | ~AbstractWiring () |
| destructor More... | |
| virtual bool | init (int robotsensornumber, int robotmotornumber, RandGen *randGen=0) |
| Initializes the number of sensors and motors from robot (to be precise the internal parameters rsensornumber and rmotornumber!), calculates the number of sensors and motors on controller side. More... | |
| virtual bool | wireSensors (const sensor *rsensors, int rsensornumber, sensor *csensors, int csensornumber, double noiseStrength) |
| Realizes wiring from robot sensors to controller sensors. More... | |
| virtual bool | wireMotors (motor *rmotors, int rmotornumber, const motor *cmotors, int cmotornumber) |
| Realizes wiring from controller motor outputs to robot motors. More... | |
| virtual int | getRobotSensornumber () |
| Returns the number of sensors on robot side. More... | |
| virtual int | getRobotMotornumber () |
| Returns the number of motors on robot side. More... | |
| virtual int | getControllerSensornumber () |
| Returns the number of sensors on controller side. More... | |
| virtual int | getControllerMotornumber () |
| Returns the number of motors on controller side. More... | |
| virtual std::list < SensorMotorInfo > | wireSensorInfos (const std::list< SensorMotorInfo > &robotSensorInfos) |
| routes the infos of the motors from robot to controller More... | |
| virtual std::list < SensorMotorInfo > | wireMotorInfos (const std::list< SensorMotorInfo > &robotMotorInfos) |
| routes the infos of the motors from robot to controller More... | |
| void | addSensorMotorInfosToInspectable (const std::list< SensorMotorInfo > &robotSensorInfos, const std::list< SensorMotorInfo > &robotMotorInfos, const std::list< SensorMotorInfo > &controllerSensorInfos, const std::list< SensorMotorInfo > &controllerMotorInfos) |
| used by WiredController to pass infos to inspectable More... | |
| Public Member Functions inherited from Inspectable | |
| Inspectable (const iparamkey &name="") | |
| TYPEDEFS END. More... | |
| virtual | ~Inspectable () |
| virtual iparamkeylist | getInternalParamNames () const |
| The list of the names of all internal parameters given by getInternalParams(). More... | |
| virtual iparamvallist | getInternalParams () const |
| virtual iparamvalptrlist | getInternalParamsPtr () const |
| be careful: matrices will be ignored More... | |
| virtual ilayerlist | getStructuralLayers () const |
| Specifies which parameter vector forms a structural layer (in terms of a neural network) The ordering is important. More... | |
| virtual iconnectionlist | getStructuralConnections () const |
| Specifies which parameter matrix forms a connection between layers (in terms of a neural network) The orderning is not important. More... | |
| virtual void | addInspectableValue (const iparamkey &key, iparamval const *val, const std::string &descr=std::string()) |
| This is the new style for adding inspectable values. More... | |
| virtual void | addInspectableMatrix (const iparamkey &key, const matrix::Matrix *m, bool only4x4AndDiag=true, const std::string &descr=std::string()) |
| This is the new style for adding inspectable values. More... | |
| virtual void | addInspectableDescription (const iparamkey &key, const std::string &descr) |
| adds a description for the given parameter using info-lines The line will start (appart from the #I) with a D for description followed by the key end then followed by the string. More... | |
| virtual void | addInfoLine (std::string infoLine) |
| Adds an info line to this inspectable instance. More... | |
| virtual void | addInfoLines (std::list< std::string > infoLineList) |
| Adds a bunch of infolines with addInfoLine to this inspectable instance. More... | |
| virtual void | removeInfoLines () |
| Removes all infolines from this inspectable instance. More... | |
| virtual const infoLinesList & | getInfoLines () const |
| Returns all infolines added to this inspectable instance. More... | |
| virtual void | addInspectable (Inspectable *insp) |
| Adds an inspectable as a child object. More... | |
| virtual void | removeInspectable (Inspectable *insp) |
| Removes an inspectable as a child object. More... | |
| virtual void | setNameOfInspectable (const iparamkey &name) |
| set the name of the inspectable More... | |
| virtual const iparamkey | getNameOfInspectable () const |
| return the name of the inspectable, getName() would conflict with Configurable::getName() too often More... | |
| virtual const inspectableList & | getInspectables () const |
| Returns the list containing all inspectable children. More... | |
| Public Member Functions inherited from Configurable | |
| Configurable () | |
| Configurable (const std::string &name, const std::string &revision) | |
| intialise with name and revision (use "$ID$") More... | |
| virtual | ~Configurable () |
| virtual void | notifyOnChange (const paramkey &key) |
| Is called when a parameter was changes via setParam(). More... | |
| virtual void | addParameter (const paramkey &key, paramval *val, paramval minBound, paramval maxBound, const paramdescr &descr=paramdescr()) |
| This is the new style for adding configurable parameters. More... | |
| virtual void | addParameter (const paramkey &key, paramval *val, const paramdescr &descr=paramdescr()) |
| See addParameter(const paramkey& key, paramval* val, paramval minBound, paramval maxBound, const paramdescr& descr) More... | |
| virtual void | addParameter (const paramkey &key, parambool *val, const paramdescr &descr=paramdescr()) |
| See addParameter(const paramkey& key, paramval* val) but for bool values. More... | |
| virtual void | addParameter (const paramkey &key, paramint *val, paramint minBound, paramint maxBound, const paramdescr &descr=paramdescr()) |
| See addParameter(const paramkey& key, paramval* val) but for int values. More... | |
| virtual void | addParameter (const paramkey &key, paramint *val, const paramdescr &descr=paramdescr()) |
| virtual void | addParameterDef (const paramkey &key, paramval *val, paramval def, paramval minBound, paramval maxBound, const paramdescr &descr=paramdescr()) |
| This function is only provided for convenience. More... | |
| virtual void | addParameterDef (const paramkey &key, paramval *val, paramval def, const paramdescr &descr=paramdescr()) |
| virtual void | addParameterDef (const paramkey &key, parambool *val, parambool def, const paramdescr &descr=paramdescr()) |
| See addParameterDef(const paramkey&, paramval*, paramval) More... | |
| virtual void | addParameterDef (const paramkey &key, paramint *val, paramint def, paramint minBound, paramint maxBound, const paramdescr &descr=paramdescr()) |
| See addParameterDef(const paramkey&, paramval*, paramval) More... | |
| virtual void | addParameterDef (const paramkey &key, paramint *val, paramint def, const paramdescr &descr=paramdescr()) |
| virtual void | setParamDescr (const paramkey &key, const paramdescr &descr, bool traverseChildren=true) |
| sets a description for the given parameter More... | |
| int | getId () const |
| return the id of the configurable objects, which is created by random on initialisation More... | |
| virtual paramkey | getName () const |
| return the name of the object More... | |
| virtual paramkey | getRevision () const |
| returns the revision of the object More... | |
| virtual void | setName (const paramkey &name, bool callSetNameOfInspectable=true) |
| Sets the name of the configurable. More... | |
| virtual void | setRevision (const paramkey &revision) |
| sets the revision Hint: { return "$ID$"; } More... | |
| virtual paramval | getParam (const paramkey &key, bool traverseChildren=true) const |
| returns the value of the requested parameter or 0 (+ error message to stderr) if unknown. More... | |
| virtual bool | hasParam (const paramkey &key, bool traverseChildren=true) const |
| Returns if the requested parameter is part of the configurable or their children. More... | |
| virtual bool | setParam (const paramkey &key, paramval val, bool traverseChildren=true) |
| sets the value of the given parameter or does nothing if unknown. More... | |
| virtual void | setParamBounds (const paramkey &key, paramval minBound, paramval maxBound, bool traverseChildren=true) |
| Sets the bounds (minBound and maxBound) of the given parameter. More... | |
| virtual void | setParamBounds (const paramkey &key, paramint minBound, paramint maxBound, bool traverseChildren=true) |
| virtual void | setParamBounds (const paramkey &key, paramvalBounds bounds, bool traverseChildren=true) |
| virtual void | setParamBounds (const paramkey &key, paramintBounds bounds, bool traverseChildren=true) |
| virtual paramlist | getParamList () const |
| The list of all parameters with there value as allocated lists. More... | |
| virtual std::list< paramkey > | getAllParamNames (bool traverseChildren=true) |
| returns all names that are configureable More... | |
| virtual parammap | getParamValMap () const |
| virtual paramintmap | getParamIntMap () const |
| virtual paramboolmap | getParamBoolMap () const |
| virtual paramdescr | getParamDescr (const paramkey &key, bool traverseChildren=true) const |
| returns the description for the given parameter More... | |
| virtual paramvalBounds | getParamvalBounds (const paramkey &key, bool traverseChildren=true) const |
| virtual paramintBounds | getParamintBounds (const paramkey &key, bool traverseChildren=true) const |
| virtual bool | hasParamDescr (const paramkey &key, bool traverseChildren=true) const |
| virtual bool | hasParamvalBounds (const paramkey &key, bool traverseChildren=true) const |
| virtual bool | hasParamintBounds (const paramkey &key, bool traverseChildren=true) const |
| virtual bool | storeCfg (const char *filenamestem, const std::list< std::string > &comments=std::list< std::string >()) |
| stores the key values paires into the file : filenamestem.cfg including the comments given in the list More... | |
| virtual bool | restoreCfg (const char *filenamestem) |
| restores the key values paires from the file : filenamestem.cfg More... | |
| void | print (FILE *f, const char *prefix, int columns=90, bool traverseChildren=true) const |
| prints the keys, values and descriptions to the file. Each line is prefixed More... | |
| bool | parse (FILE *f, const char *prefix=0, bool traverseChildren=true) |
| parses the configuration from the given file More... | |
| virtual void | addConfigurable (Configurable *conf) |
| Adds a configurable as a child object. More... | |
| virtual void | removeConfigurable (Configurable *conf) |
| Removes a configurable as a child object. More... | |
| virtual const configurableList & | getConfigurables () const |
| Returns the list containing all configurable children. More... | |
| virtual void | configurableChanged () |
| Indicates that the configurable itself or the configurable children attached to this configurable have changed. More... | |
| Public Member Functions inherited from BackCaller | |
| BackCaller () | |
| virtual | ~BackCaller () |
| virtual void | addCallbackable (Callbackable *callbackableInstance, CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| Adds a Callbackable instance to this caller instance. More... | |
| virtual void | removeCallbackable (Callbackable *callbackableInstance, CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| Removes a Callbackable instance from this caller instance. More... | |
| virtual void | removeAllCallbackables (CallbackableType type) |
| Removes all Callbackable instances from this caller instance. More... | |
| virtual void | callBack (CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| Calls all registered callbackable classes of the determined type. More... | |
| virtual void | callBackQMP (CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| Calls all registered callbackable classes of the determined type. More... | |
Protected Member Functions | |
| virtual bool | initIntern () |
| initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side More... | |
| virtual bool | wireSensorsIntern (const sensor *rsensors, int rsensornumber, sensor *csensors, int csensornumber, double noise) |
| Realizes one to one wiring from robot sensors to controller sensors. More... | |
| virtual bool | wireMotorsIntern (motor *rmotors, int rmotornumber, const motor *cmotors, int cmotornumber) |
| Realizes one to one wiring from controller motor outputs to robot motors. More... | |
| Protected Member Functions inherited from Configurable | |
| void | copyParameters (const Configurable &, bool traverseChildren=true) |
| copies the internal params of the given configurable More... | |
| void | printdescr (FILE *f, const char *prefix, const paramkey &key, int columns, int indent) const |
Protected Attributes | |
| double | boost |
| matrix::Matrix | error |
| matrix::Matrix | sens |
| Protected Attributes inherited from AbstractWiring | |
| int | plotMode |
| using plotTypes this variables defines what is plotted More... | |
| matrix::Matrix | mNoise |
| for storing the noise values More... | |
| sensor * | noisevals |
| int | noisenumber |
| int | rsensornumber |
| number of sensors at robot side More... | |
| matrix::Matrix | mRsensors |
| copy of the last robot sensors More... | |
| int | rmotornumber |
| number of motors at robot side More... | |
| matrix::Matrix | mRmotors |
| copy of the last robot motors More... | |
| int | csensornumber |
| number of sensors at controller side More... | |
| matrix::Matrix | mCsensors |
| copy of the last controller sensors More... | |
| int | cmotornumber |
| number of motors at controller side More... | |
| matrix::Matrix | mCmotors |
| copy of the last controller motors More... | |
| NoiseGenerator * | noiseGenerator |
| noise generator More... | |
| RandGen * | randGen |
| random generator used in NoiseGenerator (in case it is needed by subclasses) More... | |
| bool | initialised |
| Protected Attributes inherited from Inspectable | |
| iparamkey | name |
| iparampairlist | mapOfValues |
| imatrixpairlist | mapOfMatrices |
| infoLinesList | infoLineStringList |
Additional Inherited Members | |
| Public Types inherited from AbstractWiring | |
| enum | PlotTypes { Nothing =0, Robot =1, Controller =4, Noise =8 } |
| typedef double | sensor |
| typedef double | motor |
| Public Types inherited from Inspectable | |
| typedef std::string | iparamkey |
| typedef double | iparamval |
| typedef std::pair< iparamkey, iparamval const * > | iparampair |
| typedef std::pair< iparamkey, std::pair< const matrix::Matrix *, bool > > | imatrixpair |
| typedef std::list< iparamkey > | iparamkeylist |
| typedef std::list< std::string > | infoLinesList |
| typedef std::list< iparamval > | iparamvallist |
| typedef std::list< iparamval const * > | iparamvalptrlist |
| typedef std::list< iparampair > | iparampairlist |
| typedef std::list< imatrixpair > | imatrixpairlist |
| typedef struct Inspectable::ILayer | ILayer |
| typedef struct Inspectable::IConnection | IConnection |
| typedef std::list< ILayer > | ilayerlist |
| typedef std::list< IConnection > | iconnectionlist |
| typedef std::list< const Inspectable * > | inspectableList |
| Public Types inherited from Configurable | |
| typedef std::string | paramkey |
| typedef std::string | paramdescr |
| typedef double | paramval |
| typedef std::list< std::pair < paramkey, paramval > > | paramlist |
| typedef std::map< paramkey, paramval * > | parammap |
| typedef bool | parambool |
| typedef std::list< std::pair < paramkey, parambool > > | paramboollist |
| typedef std::map< paramkey, parambool * > | paramboolmap |
| typedef int | paramint |
| typedef std::list< std::pair < paramkey, paramint > > | paramintlist |
| typedef std::map< paramkey, paramint * > | paramintmap |
| typedef std::map< paramkey, paramdescr > | paramdescrmap |
| typedef std::pair< paramval, paramval > | paramvalBounds |
| typedef std::map< paramkey, paramvalBounds > | paramvalBoundsMap |
| typedef std::pair< paramint, paramint > | paramintBounds |
| typedef std::map< paramkey, paramintBounds > | paramintBoundsMap |
| typedef std::pair< paramkey, paramval * > | paramvalpair |
| typedef std::pair< paramkey, parambool * > | paramboolpair |
| typedef std::pair< paramkey, paramint * > | paramintpair |
| typedef std::vector < Configurable * > | configurableList |
| Public Types inherited from BackCaller | |
| typedef unsigned long | CallbackableType |
| Static Public Attributes inherited from Configurable | |
| static const CallbackableType | CALLBACK_CONFIGURABLE_CHANGED = 11 |
| Static Public Attributes inherited from BackCaller | |
| static const CallbackableType | DEFAULT_CALLBACKABLE_TYPE = 0 |
| This is the default Callbackable type. More... | |
Implements one to one wiring that integrates the mismatch between motor commands (understood as target values) and sensor values and adds them to the controller output If more sensors than motors are used it uses just the first m sensors.
| ForceBoostWiring | ( | NoiseGenerator * | noise, |
| double | boost = 0, |
||
| bool | exportBoostError = false, |
||
| int | plotMode = Controller, |
||
| const std::string & | name = "ForceBoostWiring" |
||
| ) |
constructor
| noise | NoiseGenerator that is used for adding noise to sensor values |
| plotMode | see AbstractWiring |
| boost | factor for mismatch integration |
| exportBoostError | whether to export force boost error to inspectables (guilogger) |
|
virtual |
destructor
|
protectedvirtual |
initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side
Implements AbstractWiring.
|
virtual |
reset internal state
Reimplemented from AbstractWiring.
|
protectedvirtual |
Realizes one to one wiring from controller motor outputs to robot motors.
| rmotors | pointer to array of motorvalues for robot |
| rmotornumber | number of robot motors |
| cmotors | pointer to array of motorvalues from controller |
| cmotornumber | number of motorvalues from controller |
Implements AbstractWiring.
|
protectedvirtual |
Realizes one to one wiring from robot sensors to controller sensors.
| rsensors | pointer to array of sensorvalues from robot |
| rsensornumber | number of sensors from robot |
| csensors | pointer to array of sensorvalues for controller |
| csensornumber | number of sensors to controller |
| noise | size of the noise added to the sensors |
Implements AbstractWiring.
|
protected |
|
protected |
|
protected |
 1.8.6
1.8.6 
