#include <assert.h>
#include "sphererobot.h"
#include "primitive.h"
#include "joint.h"
#include "sliderservo.h"
#include "invisibleprimitive.h"
#include "matrix.h"
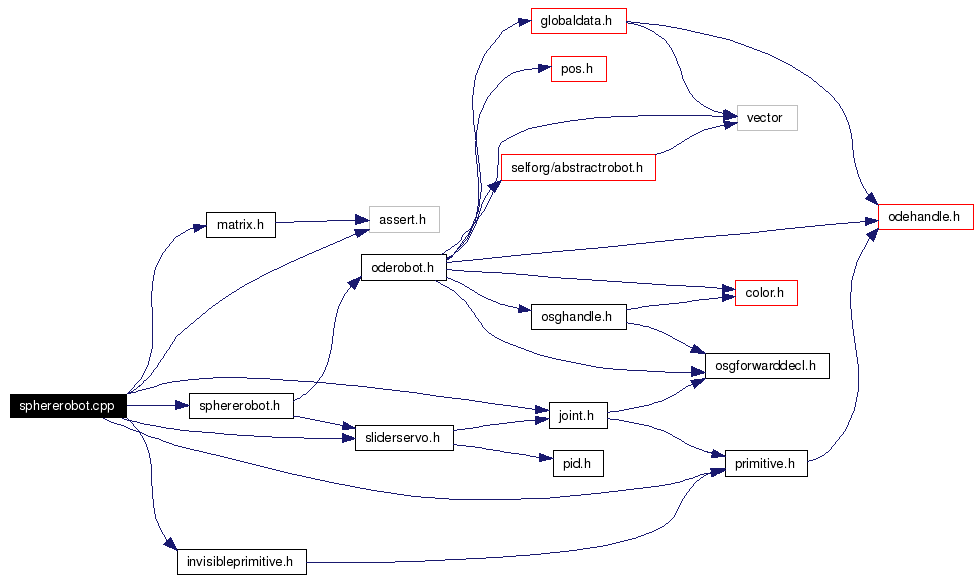
Include dependency graph for sphererobot.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | lpzrobots |
 1.4.5
1.4.5