#include <hingeservo.h>
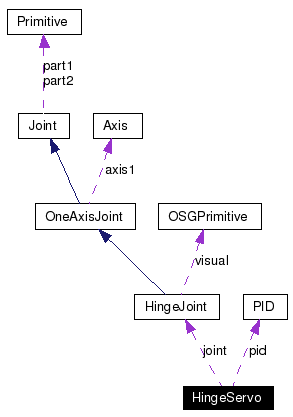
Collaboration diagram for HingeServo:
Definition at line 44 of file hingeservo.h.
Public Member Functions | |
| HingeServo (HingeJoint *joint, double min, double max, double power) | |
| min and max values are understood as travel bounds. | |
| void | set (double position) |
| sets the set point of the servo. | |
| double | get () |
| returns the position of the slider in ranges [-1, 1] (scaled by min, max) | |
| void | setPower (double power) |
|
||||||||||||||||||||
|
min and max values are understood as travel bounds. power is the power of the servo Definition at line 47 of file hingeservo.cpp. |
|
|
returns the position of the slider in ranges [-1, 1] (scaled by min, max)
Definition at line 66 of file hingeservo.cpp. |
|
|
sets the set point of the servo. Position must be between -1 and 1. It is scaled to fit into min, max Definition at line 55 of file hingeservo.cpp. |
|
|
Definition at line 76 of file hingeservo.cpp. |
 1.4.5
1.4.5