#include <invertmotorcontroller.h>
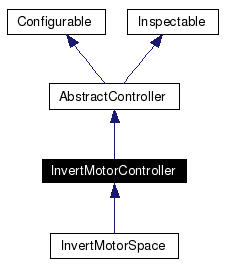
Inheritance diagram for InvertMotorController:
Implements standart parameters: epsC, rho, mu, stepnumber4avg, stepnumber4delay
Definition at line 15 of file invertmotorcontroller.h.
Public Member Functions | |
| InvertMotorController (unsigned short buffersize) | |
| virtual paramval | getParam (const paramkey &key) const |
| virtual bool | setParam (const paramkey &key, paramval val) |
| virtual paramlist | getParamList () const |
| The list of all parameters with there value as allocated lists. | |
Protected Member Functions | |
| void | putInBuffer (Matrix *buffer, const Matrix &vec, int delay=0) |
Static Protected Member Functions | |
| static double | g (double z) |
| neuron transfer function | |
| static double | g_s (double z) |
| first dervative | |
| static double | g_s_inv (double z) |
| inverse of the first derivative | |
| static double | squash (double z) |
| squashing function, to protect against to large weight updates | |
Protected Attributes | |
| paramval | epsC |
| paramval | desens |
| paramval | s4delay |
| paramval | s4avg |
| paramval | steps |
| paramval | epsA |
| paramval | factorB |
| paramval | zetaupdate |
| paramval | dampA |
| short | logaE |
| short | rootE |
| short | relativeE |
| paramval | squashSize |
| paramval | adaptRate |
| paramval | nomUpdate |
| paramval | noiseB |
| paramval | teacher |
| int | t |
| unsigned short | buffersize |
| string | name |
| bool | initialised |
|
|
Definition at line 17 of file invertmotorcontroller.h. |
|
|
neuron transfer function
Definition at line 138 of file invertmotorcontroller.h. |
|
|
first dervative
Definition at line 144 of file invertmotorcontroller.h. |
|
|
inverse of the first derivative
Definition at line 154 of file invertmotorcontroller.h. |
|
|
Definition at line 40 of file invertmotorcontroller.h. |
|
|
The list of all parameters with there value as allocated lists.
Reimplemented from Configurable. Definition at line 84 of file invertmotorcontroller.h. |
|
||||||||||||||||
|
Definition at line 133 of file invertmotorcontroller.h. |
|
||||||||||||
|
Definition at line 61 of file invertmotorcontroller.h. |
|
|
squashing function, to protect against to large weight updates
Definition at line 164 of file invertmotorcontroller.h. |
|
|
Definition at line 121 of file invertmotorcontroller.h. |
|
|
Definition at line 127 of file invertmotorcontroller.h. |
|
|
Definition at line 115 of file invertmotorcontroller.h. |
|
|
Definition at line 108 of file invertmotorcontroller.h. |
|
|
Definition at line 112 of file invertmotorcontroller.h. |
|
|
Definition at line 107 of file invertmotorcontroller.h. |
|
|
Definition at line 113 of file invertmotorcontroller.h. |
|
|
Definition at line 129 of file invertmotorcontroller.h. |
|
|
Definition at line 116 of file invertmotorcontroller.h. |
|
|
Definition at line 128 of file invertmotorcontroller.h. |
|
|
Definition at line 123 of file invertmotorcontroller.h. |
|
|
Definition at line 122 of file invertmotorcontroller.h. |
|
|
Definition at line 118 of file invertmotorcontroller.h. |
|
|
Definition at line 117 of file invertmotorcontroller.h. |
|
|
Definition at line 110 of file invertmotorcontroller.h. |
|
|
Definition at line 109 of file invertmotorcontroller.h. |
|
|
Definition at line 120 of file invertmotorcontroller.h. |
|
|
Definition at line 111 of file invertmotorcontroller.h. |
|
|
Definition at line 126 of file invertmotorcontroller.h. |
|
|
Definition at line 124 of file invertmotorcontroller.h. |
|
|
Definition at line 114 of file invertmotorcontroller.h. |
 1.4.5
1.4.5