#include <joint.h>
Inherits Joint.
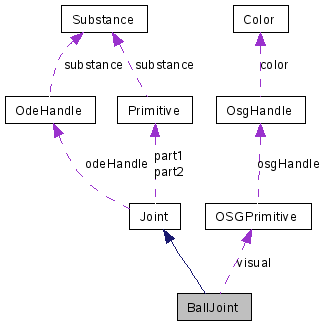
Inheritance diagram for BallJoint:
Public Member Functions | |
| BallJoint (Primitive *part1, Primitive *part2, const osg::Vec3 &anchor) | |
| virtual | ~BallJoint () |
| virtual void | init (const OdeHandle &odeHandle, const OsgHandle &osgHandle, bool withVisual=true, double visualSize=0.2) |
| initialises (and creates) the joint. | |
| virtual void | update () |
| should syncronise the Ode stuff and the OSG notes (if any) | |
| virtual int | getNumberAxes () const |
| returns the number of Axes | |
| virtual void | setParam (int parameter, double value) |
| sets the ODE joint parameter (see ODE manual) | |
| virtual double | getParam (int parameter) const |
| return the ODE joint parameter (see ODE manual) | |
Protected Attributes | |
| OSGPrimitive * | visual |
| ~BallJoint | ( | ) | [virtual] |
| virtual int getNumberAxes | ( | ) | const [inline, virtual] |
| double getParam | ( | int | parameter | ) | const [virtual] |
| void init | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| bool | withVisual = true, |
|||
| double | visualSize = 0.2 | |||
| ) | [virtual] |
initialises (and creates) the joint.
If visual is true then ball is drawn as a sphere with radius of visualSize.
Reimplemented from Joint.
| void setParam | ( | int | parameter, | |
| double | value | |||
| ) | [virtual] |
| void update | ( | ) | [virtual] |
OSGPrimitive* visual [protected] |
 1.4.7
1.4.7