#include <one2onewiring.h>
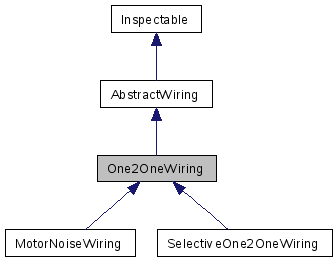
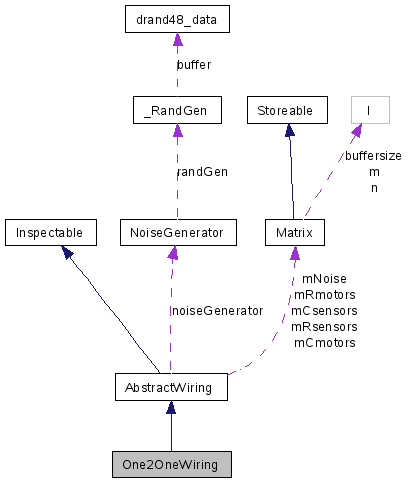
Inherits AbstractWiring.
Inherited by MotorNoiseWiring, and SelectiveOne2OneWiring.
Inheritance diagram for One2OneWiring:
Public Member Functions | |
| One2OneWiring (NoiseGenerator *noise, int plotMode=Controller, int blind=0) | |
| constructor | |
| virtual | ~One2OneWiring () |
| destructor | |
Protected Member Functions | |
| virtual bool | initIntern (int robotsensornumber, int robotmotornumber, RandGen *randGen=0) |
| initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side | |
| virtual bool | wireSensorsIntern (const sensor *rsensors, int rsensornumber, sensor *csensors, int csensornumber, double noise) |
| Realizes one to one wiring from robot sensors to controller sensors. | |
| virtual bool | wireMotorsIntern (motor *rmotors, int rmotornumber, const motor *cmotors, int cmotornumber) |
| Realizes one to one wiring from controller motor outputs to robot motors. | |
Protected Attributes | |
| int | blind |
| motor * | blindmotors |
| blind motor values | |
| One2OneWiring | ( | NoiseGenerator * | noise, | |
| int | plotMode = Controller, |
|||
| int | blind = 0 | |||
| ) |
constructor
| noise | NoiseGenerator that is used for adding noise to sensor values | |
| plotMode | see AbstractWiring | |
| blind | number of blind channels (additional sensors and motors coupled directly) |
| ~One2OneWiring | ( | ) | [virtual] |
destructor
| bool initIntern | ( | int | robotsensornumber, | |
| int | robotmotornumber, | |||
| RandGen * | randGen = 0 | |||
| ) | [protected, virtual] |
initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side
Implements AbstractWiring.
Reimplemented in SelectiveOne2OneWiring.
| bool wireMotorsIntern | ( | motor * | rmotors, | |
| int | rmotornumber, | |||
| const motor * | cmotors, | |||
| int | cmotornumber | |||
| ) | [protected, virtual] |
Realizes one to one wiring from controller motor outputs to robot motors.
| rmotors | pointer to array of motorvalues for robot | |
| rmotornumber | number of robot motors | |
| cmotors | pointer to array of motorvalues from controller | |
| cmotornumber | number of motorvalues from controller |
Implements AbstractWiring.
| bool wireSensorsIntern | ( | const sensor * | rsensors, | |
| int | rsensornumber, | |||
| sensor * | csensors, | |||
| int | csensornumber, | |||
| double | noise | |||
| ) | [protected, virtual] |
Realizes one to one wiring from robot sensors to controller sensors.
| rsensors | pointer to array of sensorvalues from robot | |
| rsensornumber | number of sensors from robot | |
| csensors | pointer to array of sensorvalues for controller | |
| csensornumber | number of sensors to controller | |
| noise | size of the noise added to the sensors |
Implements AbstractWiring.
Reimplemented in SelectiveOne2OneWiring.
int blind [protected] |
motor* blindmotors [protected] |
blind motor values
 1.4.7
1.4.7