#include <invertmotornstep.h>
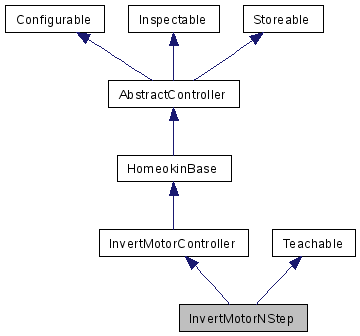
Inherits InvertMotorController, and Teachable.
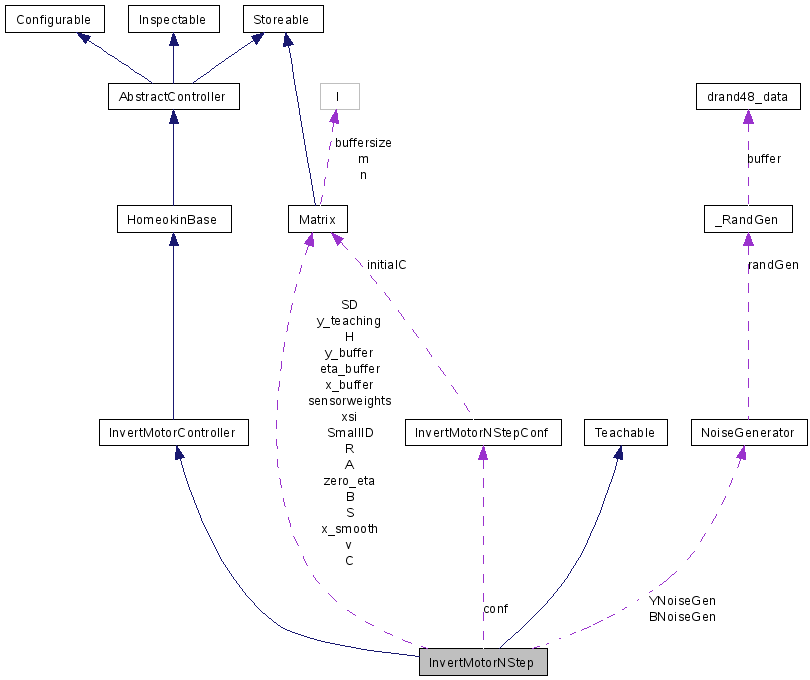
Inheritance diagram for InvertMotorNStep:
Public Member Functions | |
| InvertMotorNStep (const InvertMotorNStepConf &conf=getDefaultConf()) | |
| virtual void | init (int sensornumber, int motornumber, RandGen *randGen=0) |
| initialisation of the controller with the given sensor/ motornumber Must be called before use. | |
| virtual | ~InvertMotorNStep () |
| virtual int | getSensorNumber () const |
| returns the number of sensors the controller was initialised with or 0 if not initialised | |
| virtual int | getMotorNumber () const |
| returns the mumber of motors the controller was initialised with or 0 if not initialised | |
| virtual void | step (const sensor *, int number_sensors, motor *, int number_motors) |
| performs one step (includes learning). | |
| virtual void | stepNoLearning (const sensor *, int number_sensors, motor *, int number_motors) |
| performs one step without learning. Calulates motor commands from sensor inputs. | |
| virtual bool | store (FILE *f) const |
| stores the controller values to a given file. | |
| virtual bool | restore (FILE *f) |
| loads the controller values from a given file. | |
| virtual std::list< ILayer > | getStructuralLayers () const |
| Specifies which parameter vector forms a structural layer (in terms of a neural network) The ordering is important. | |
| virtual std::list< IConnection > | getStructuralConnections () const |
| Specifies which parameter matrix forms a connection between layers (in terms of a neural network) The orderning is not important. | |
| virtual void | setMotorTeachingSignal (const motor *teaching, int len) |
| The given motor teaching signal is used for this timestep. | |
| virtual void | setSensorTeachingSignal (const sensor *teaching, int len) |
| The given sensor teaching signal (distal learning) is used for this timestep. | |
| void | getLastMotors (motor *motors, int len) |
| void | getLastSensors (sensor *sensors, int len) |
| virtual void | setMotorTeaching (const matrix::Matrix &teaching) |
| The given motor teaching signal is used for this timestep. | |
| virtual void | setSensorTeaching (const matrix::Matrix &teaching) |
| The given sensor teaching signal (distal learning) is used for this timestep. | |
| virtual matrix::Matrix | getLastMotorValues () |
| returns the last motor values (useful for cross motor coupling) | |
| virtual matrix::Matrix | getLastSensorValues () |
| returns the last sensor values (useful for cross sensor coupling) | |
| void | calcCandHUpdatesTeaching (matrix::Matrix &C_update, matrix::Matrix &H_update, int y_delay) |
| calculates the Update for C and H using the teaching signal | |
| virtual void | setReinforcement (double reinforcement) |
| set the reinforcement signal for this timestep. | |
| void | setSensorWeights (const matrix::Matrix &weights) |
| sets the sensor channel weights (matrix should be (getSensorNumber() x 1) | |
| matrix::Matrix | getSensorWeights () const |
| matrix::Matrix & | getC () |
| reference to C-matrix | |
| double | getE () const |
| void | kwtaInhibition (matrix::Matrix &weightmatrix, unsigned int k, double damping) |
| k-winner take all inhibition for synapses. | |
| void | limitC (matrix::Matrix &weightmatrix, unsigned int rfSize) |
| sets all connections to zero which are further away then rfSize from the diagonal. | |
Static Public Member Functions | |
| static InvertMotorNStepConf | getDefaultConf () |
| static double | clip095 (double x) |
| static double | regularizedInverse (double v) |
Public Attributes | |
| matrix::Matrix | A |
| Model Matrix (motors to sensors). | |
| matrix::Matrix | S |
| additional Model Matrix (sensors to sensors) | |
| matrix::Matrix | SD |
| additional Model Matrix (sensors derivatives to sensors) | |
| matrix::Matrix | C |
| Controller Matrix. | |
| matrix::Matrix | H |
| Controller Bias. | |
| matrix::Matrix | B |
| Model Bias. | |
Protected Member Functions | |
| virtual void | fillBuffersAndControl (const sensor *x_, int number_sensors, motor *y_, int number_motors) |
| puts the sensors in the ringbuffer, generate controller values and put them in the | |
| virtual void | calcEtaAndBufferIt (int delay) |
| calculates the first shift into the motor space useing delayed motor values. | |
| virtual void | calcXsi (int delay) |
| calculates xsi for the current time step using the delayed y values | |
| virtual void | learnController (int delay) |
| learn H,C with motors y and corresponding sensors x | |
| virtual void | calcCandHUpdates (matrix::Matrix &C_update, matrix::Matrix &H_update, int delay) |
| calculates the Update for C and H | |
| virtual void | updateCandH (const matrix::Matrix &C_update, const matrix::Matrix &H_update, double squashSize) |
| updates the matrix C and H | |
| virtual void | learnModel (int delay) |
| learn A, (and S) using motors y and corresponding sensors x | |
| virtual matrix::Matrix | model (const matrix::Matrix *x_buffer, int delay, const matrix::Matrix &y) |
| calculates the predicted sensor values | |
| virtual void | management () |
| handles inhibition damping etc. | |
| virtual matrix::Matrix | calculateControllerValues (const matrix::Matrix &x_smooth) |
| returns controller output for given sensor values | |
| matrix::Matrix | calcDerivatives (const matrix::Matrix *buffer, int delay) |
| Calculates first and second derivative and returns both in on matrix (above). | |
Protected Attributes | |
| unsigned short | number_sensors |
| unsigned short | number_motors |
| NoiseGenerator * | BNoiseGen |
| Noisegenerator for noisy bias. | |
| NoiseGenerator * | YNoiseGen |
| Noisegenerator for noisy motor output. | |
| matrix::Matrix | R |
| C*A. | |
| matrix::Matrix | SmallID |
| small identity matrix in the dimension of R | |
| matrix::Matrix | xsi |
| current output error | |
| matrix::Matrix | v |
| current reconstructed error | |
| double | E_val |
| value of Error function | |
| double | xsi_norm |
| norm of matrix | |
| double | xsi_norm_avg |
| average norm of xsi (used to define whether Modell learns) | |
| double | pain |
| if the modelling error (xsi) is too high we have a pain signal | |
| matrix::Matrix * | x_buffer |
| matrix::Matrix * | y_buffer |
| matrix::Matrix * | eta_buffer |
| matrix::Matrix | zero_eta |
| matrix::Matrix | x_smooth |
| matrix::Matrix | y_teaching |
| teaching motor signal | |
| bool | useTeaching |
| flag whether there is an actual teachning signal or not | |
| double | reinforcement |
| reinforcement value (set via setReinforcement()) | |
| double | reinforcefactor |
| reinforcement factor (set to 1 every step after learning) | |
| int | t_rand |
| initial random time to avoid syncronous management of all controllers | |
| matrix::Matrix | sensorweights |
| sensor channel weight (each channel gets a certain importance) | |
| double | continuity |
| factor to teach for continuity: subsequent motor commands should not differ too much | |
| double | modelCompliant |
| learning factor for model (or sensor) compliant learning | |
| int | managementInterval |
| interval between subsequent management function calls | |
| paramval | inhibition |
| inhibition strength for sparce kwta strategy (is scaled with epsC) | |
| paramval | kwta |
| (int) number of synapses that get strengthend | |
| paramval | limitRF |
| (int) receptive field of motor neurons (number of offcenter sensors) if null then no limitation. Mutual exclusive with inhibition | |
| paramval | dampS |
| damping of S matrix | |
| paramval | dampC |
| damping of C matrix | |
| paramval | activeExplore |
| decides whether and how strong the backpropagated error is used as a control signal | |
| paramval | cfactor |
| paramval | cnondiagabs |
| paramval | cdiagabs |
| paramval | noiseY |
| noise strength for y | |
| InvertMotorNStepConf | conf |
Implements standart parameters: eps, rho, mu, stepnumber4avg, stepnumber4delay
| InvertMotorNStep | ( | const InvertMotorNStepConf & | conf = getDefaultConf() |
) |
| ~InvertMotorNStep | ( | ) | [virtual] |
| void calcCandHUpdates | ( | matrix::Matrix & | C_update, | |
| matrix::Matrix & | H_update, | |||
| int | delay | |||
| ) | [protected, virtual] |
calculates the Update for C and H
| void calcCandHUpdatesTeaching | ( | matrix::Matrix & | C_update, | |
| matrix::Matrix & | H_update, | |||
| int | y_delay | |||
| ) |
calculates the Update for C and H using the teaching signal
| Matrix calcDerivatives | ( | const matrix::Matrix * | buffer, | |
| int | delay | |||
| ) | [protected] |
Calculates first and second derivative and returns both in on matrix (above).
We use simple discrete approximations:
![\[ f'(x) = (f(x) - f(x-1)) / 2 \]](form_0.png)
![\[ f''(x) = f(x) - 2f(x-1) + f(x-2) \]](form_1.png)
where we have to go into the past because we do not have f(x+1). The scaling can be neglegted.
| void calcEtaAndBufferIt | ( | int | delay | ) | [protected, virtual] |
calculates the first shift into the motor space useing delayed motor values.
| Matrix calculateControllerValues | ( | const matrix::Matrix & | x_smooth | ) | [protected, virtual] |
returns controller output for given sensor values
| x_smooth | smoothed sensors Matrix(number_channels,1) |
| void calcXsi | ( | int | delay | ) | [protected, virtual] |
calculates xsi for the current time step using the delayed y values
| double clip095 | ( | double | x | ) | [static] |
| void fillBuffersAndControl | ( | const sensor * | x_, | |
| int | number_sensors, | |||
| motor * | y_, | |||
| int | number_motors | |||
| ) | [protected, virtual] |
puts the sensors in the ringbuffer, generate controller values and put them in the
| matrix::Matrix& getC | ( | ) | [inline] |
reference to C-matrix
| static InvertMotorNStepConf getDefaultConf | ( | ) | [inline, static] |
| double getE | ( | ) | const [inline] |
| void getLastMotors | ( | motor * | motors, | |
| int | len | |||
| ) |
| matrix::Matrix getLastMotorValues | ( | ) | [virtual] |
| void getLastSensors | ( | sensor * | sensors, | |
| int | len | |||
| ) |
| matrix::Matrix getLastSensorValues | ( | ) | [virtual] |
| virtual int getMotorNumber | ( | ) | const [inline, virtual] |
returns the mumber of motors the controller was initialised with or 0 if not initialised
Implements AbstractController.
| virtual int getSensorNumber | ( | ) | const [inline, virtual] |
returns the number of sensors the controller was initialised with or 0 if not initialised
Implements AbstractController.
| matrix::Matrix getSensorWeights | ( | ) | const [inline] |
| list< Inspectable::IConnection > getStructuralConnections | ( | ) | const [virtual] |
Specifies which parameter matrix forms a connection between layers (in terms of a neural network) The orderning is not important.
Reimplemented from Inspectable.
| list< Inspectable::ILayer > getStructuralLayers | ( | ) | const [virtual] |
Specifies which parameter vector forms a structural layer (in terms of a neural network) The ordering is important.
The first entry is the input layer and so on.
Reimplemented from Inspectable.
| void init | ( | int | sensornumber, | |
| int | motornumber, | |||
| RandGen * | randGen = 0 | |||
| ) | [virtual] |
initialisation of the controller with the given sensor/ motornumber Must be called before use.
The random generator is optional.
Implements AbstractController.
| void kwtaInhibition | ( | matrix::Matrix & | weightmatrix, | |
| unsigned int | k, | |||
| double | damping | |||
| ) |
k-winner take all inhibition for synapses.
k largest synapses are strengthed and the rest are inhibited. strong synapes are scaled by 1+(damping/k) and weak synapses are scaled by 1-(damping/(n-k)) where n is the number of synapes
| weightmatrix | reference to weight matrix. Synapses for a neuron are in one row. The inhibition is done for all rows independently | |
| k | number of synapes to strengthen | |
| damping | strength of supression and exitation (typically 0.001) |
| void learnController | ( | int | delay | ) | [protected, virtual] |
learn H,C with motors y and corresponding sensors x
| void learnModel | ( | int | delay | ) | [protected, virtual] |
learn A, (and S) using motors y and corresponding sensors x
| void limitC | ( | matrix::Matrix & | weightmatrix, | |
| unsigned int | rfSize | |||
| ) |
sets all connections to zero which are further away then rfSize from the diagonal.
If rfSize == 1 then only main diagonal is left. If rfSize = 2: main diagonal and upper and lower side diagonal are kept and so on and so forth.
| void management | ( | ) | [protected, virtual] |
handles inhibition damping etc.
| Matrix model | ( | const matrix::Matrix * | x_buffer, | |
| int | delay, | |||
| const matrix::Matrix & | y | |||
| ) | [protected, virtual] |
calculates the predicted sensor values
| double regularizedInverse | ( | double | v | ) | [static] |
| bool restore | ( | FILE * | f | ) | [virtual] |
| void setMotorTeaching | ( | const matrix::Matrix & | teaching | ) | [virtual] |
The given motor teaching signal is used for this timestep.
It is used as a feed forward teaching signal for the controller. Please note, that the teaching signal has to be given each timestep for a continuous teaching process.
| teaching,: | matrix with dimensions (motornumber,1) |
Implements Teachable.
| void setMotorTeachingSignal | ( | const motor * | teaching, | |
| int | len | |||
| ) | [virtual] |
The given motor teaching signal is used for this timestep.
It is used as a feed forward teaching signal for the controller. Please note, that the teaching signal has to be given each timestep for a continuous teaching process.
| void setReinforcement | ( | double | reinforcement | ) | [virtual] |
set the reinforcement signal for this timestep.
It is used to calculate a factor for the update. Factor = 1-0.95*reinforcement.
| reinforcement | value between -1 and 1 (-1 bad, 0 neutral, 1 good) |
| void setSensorTeaching | ( | const matrix::Matrix & | teaching | ) | [virtual] |
The given sensor teaching signal (distal learning) is used for this timestep.
The belonging motor teachung signal is calculated by the inverse model. See setMotorTeaching
| teaching,: | matrix with dimensions (motorsensors,1) |
Implements Teachable.
| void setSensorTeachingSignal | ( | const sensor * | teaching, | |
| int | len | |||
| ) | [virtual] |
The given sensor teaching signal (distal learning) is used for this timestep.
First the belonging motor teachung signal is calculated by the inverse model. See setMotorTeachingSignal
| void setSensorWeights | ( | const matrix::Matrix & | weights | ) |
sets the sensor channel weights (matrix should be (getSensorNumber() x 1)
performs one step (includes learning).
Calulates motor commands from sensor inputs.
Implements AbstractController.
performs one step without learning. Calulates motor commands from sensor inputs.
Implements AbstractController.
| bool store | ( | FILE * | f | ) | const [virtual] |
| void updateCandH | ( | const matrix::Matrix & | C_update, | |
| const matrix::Matrix & | H_update, | |||
| double | squashSize | |||
| ) | [protected, virtual] |
updates the matrix C and H
Model Matrix (motors to sensors).
paramval activeExplore [protected] |
decides whether and how strong the backpropagated error is used as a control signal
Model Bias.
NoiseGenerator* BNoiseGen [protected] |
Noisegenerator for noisy bias.
Controller Matrix.
paramval cnondiagabs [protected] |
InvertMotorNStepConf conf [protected] |
double continuity [protected] |
factor to teach for continuity: subsequent motor commands should not differ too much
double E_val [protected] |
value of Error function
matrix::Matrix* eta_buffer [protected] |
Controller Bias.
paramval inhibition [protected] |
inhibition strength for sparce kwta strategy (is scaled with epsC)
(int) receptive field of motor neurons (number of offcenter sensors) if null then no limitation. Mutual exclusive with inhibition
int managementInterval [protected] |
interval between subsequent management function calls
double modelCompliant [protected] |
learning factor for model (or sensor) compliant learning
unsigned short number_motors [protected] |
unsigned short number_sensors [protected] |
double pain [protected] |
if the modelling error (xsi) is too high we have a pain signal
matrix::Matrix R [protected] |
C*A.
double reinforcefactor [protected] |
reinforcement factor (set to 1 every step after learning)
double reinforcement [protected] |
reinforcement value (set via setReinforcement())
additional Model Matrix (sensors to sensors)
additional Model Matrix (sensors derivatives to sensors)
matrix::Matrix sensorweights [protected] |
sensor channel weight (each channel gets a certain importance)
matrix::Matrix SmallID [protected] |
small identity matrix in the dimension of R
int t_rand [protected] |
initial random time to avoid syncronous management of all controllers
bool useTeaching [protected] |
flag whether there is an actual teachning signal or not
matrix::Matrix v [protected] |
current reconstructed error
matrix::Matrix* x_buffer [protected] |
matrix::Matrix x_smooth [protected] |
matrix::Matrix xsi [protected] |
current output error
double xsi_norm [protected] |
norm of matrix
double xsi_norm_avg [protected] |
average norm of xsi (used to define whether Modell learns)
matrix::Matrix* y_buffer [protected] |
matrix::Matrix y_teaching [protected] |
teaching motor signal
NoiseGenerator* YNoiseGen [protected] |
Noisegenerator for noisy motor output.
matrix::Matrix zero_eta [protected] |
 1.4.7
1.4.7