#include <invertmotorcontroller.h>
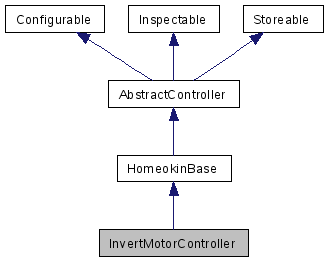
Inherits HomeokinBase.
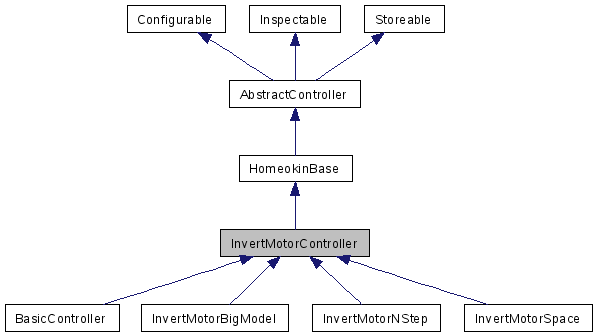
Inherited by BasicController, InvertMotorBigModel, InvertMotorNStep, and InvertMotorSpace.
Inheritance diagram for InvertMotorController:
Public Member Functions | |
| InvertMotorController (unsigned short buffersize, const std::string &name, const std::string &revision) | |
Protected Attributes | |
| paramval | desens |
| paramval | steps |
| number of timesteps is used for controller learning | |
| paramval | zetaupdate |
| paramval | dampA |
| damping term for model (0: no damping, 0.1 high damping) | |
| parambool | relativeE |
| if not 0: a relative error signal is used (xsi is normalised in respect to |y|) | |
| paramval | adaptRate |
| adaptation rate for learning rate adaptation | |
| paramval | nomUpdate |
| nominal update of controller in respect to matrix norm | |
| paramval | noiseB |
| size of the additional noise for model bias B | |
| paramval | noiseY |
| size of the additional noise for motor values | |
| paramval | teacher |
| factor for teaching signal | |
Parameters like dampA, adaptrate, noiseY...
| InvertMotorController | ( | unsigned short | buffersize, | |
| const std::string & | name, | |||
| const std::string & | revision | |||
| ) | [inline] |
if not 0: a relative error signal is used (xsi is normalised in respect to |y|)
paramval zetaupdate [protected] |
 1.4.7
1.4.7