#include <abstracttracksection.h>
Inherited by DegreeSegment, and StraightLine.
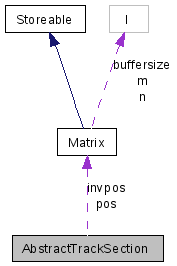
Inheritance diagram for AbstractTrackSection:
Public Member Functions | |
| AbstractTrackSection (const Position &p, const double angle) | |
| Constructor where you can set the position and rotation by:. | |
| AbstractTrackSection (const Matrix &pose) | |
| Constructor where you can set the pos-matrix by this constructor:. | |
| virtual | ~AbstractTrackSection () |
| virtual void | create (dSpaceID space)=0 |
| virtual void | destroy ()=0 |
| virtual void | draw ()=0 |
| virtual Matrix | getTransformedEndMatrix ()=0 |
| gives the position and rotation(angle) of the segment at the end of the segment so that a new segment could be placed there the result is a matrix | |
| virtual bool | isInside (const Position &p)=0 |
| returns true if the real coordinates lay inside of the segment | |
| virtual double | getSectionIdValue (const Position &p)=0 |
| returns a value between 0 and length that tells at which section you are on the segment. | |
| virtual double | getWidthIdValue (const Position &p)=0 |
| returns a value between 0 and width that tells at which width you are on the segment, 0 means right and width means left. | |
| virtual double | getLength ()=0 |
| returns the length of the segment, here it is the length of the arc formula is: radius * angle; | |
| virtual double | getWidth ()=0 |
| returns the width of the segment, | |
| virtual void | setWidth (double w)=0 |
| sets the width of the segment, | |
| Matrix | getPoseMatrix () |
| Position | transformToLocalCoord (const Position &p) |
| Position | transformToGlobalCoord (const Position &p) |
| Matrix | getInversePoseMatrix () |
Protected Member Functions | |
| void | setPoseMatrix (const Matrix &m) |
| Position | getPosition () |
| gives actual position of the obstacle | |
| AbstractTrackSection | ( | const Position & | p, | |
| const double | angle | |||
| ) | [inline] |
Constructor where you can set the position and rotation by:.
| p | is the position of the segment | |
| angle | is the rotation of the segment |
| AbstractTrackSection | ( | const Matrix & | pose | ) | [inline] |
Constructor where you can set the pos-matrix by this constructor:.
| position | is the position AND rotation of the segment |
| virtual ~AbstractTrackSection | ( | ) | [inline, virtual] |
| virtual void create | ( | dSpaceID | space | ) | [pure virtual] |
Implemented in DegreeSegment, and StraightLine.
| virtual void destroy | ( | ) | [pure virtual] |
Implemented in DegreeSegment, and StraightLine.
| virtual void draw | ( | ) | [pure virtual] |
Implemented in DegreeSegment, and StraightLine.
| Matrix getInversePoseMatrix | ( | ) | [inline] |
| virtual double getLength | ( | ) | [pure virtual] |
returns the length of the segment, here it is the length of the arc formula is: radius * angle;
Implemented in DegreeSegment, and StraightLine.
| Matrix getPoseMatrix | ( | ) | [inline] |
| Position getPosition | ( | ) | [inline, protected] |
gives actual position of the obstacle
| virtual double getSectionIdValue | ( | const Position & | p | ) | [pure virtual] |
returns a value between 0 and length that tells at which section you are on the segment.
returns -1 if no IdValue can be given
Implemented in DegreeSegment, and StraightLine.
| virtual Matrix getTransformedEndMatrix | ( | ) | [pure virtual] |
gives the position and rotation(angle) of the segment at the end of the segment so that a new segment could be placed there the result is a matrix
Implemented in DegreeSegment, and StraightLine.
| virtual double getWidth | ( | ) | [pure virtual] |
| virtual double getWidthIdValue | ( | const Position & | p | ) | [pure virtual] |
returns a value between 0 and width that tells at which width you are on the segment, 0 means right and width means left.
returns -1 if no WidthValue can be given
Implemented in DegreeSegment, and StraightLine.
| virtual bool isInside | ( | const Position & | p | ) | [pure virtual] |
returns true if the real coordinates lay inside of the segment
Implemented in DegreeSegment, and StraightLine.
| void setPoseMatrix | ( | const Matrix & | m | ) | [inline, protected] |
| virtual void setWidth | ( | double | w | ) | [pure virtual] |
 1.4.7
1.4.7