|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
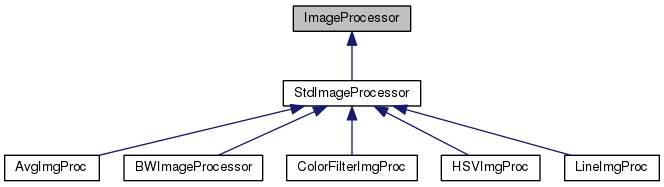
Base class for image processing units. More...
#include <imageprocessor.h>
Public Member Functions | |
| ImageProcessor () | |
| virtual | ~ImageProcessor () |
| virtual Camera::CameraImage | init (const Camera::CameraImages &imgs)=0 |
| initialization with all images so far. More... | |
| virtual void | process ()=0 |
| perform the image calculation here More... | |
Base class for image processing units.
The result of a processing is an image (returned by init) The source for processing can be any image from previous units. An implemenation must store the pointers to the source(s) and must also hold a destination image.
|
inline |
|
inlinevirtual |
|
pure virtual |
initialization with all images so far.
The last image in the list is probably the one to use for processing. (output from last processor)
Implemented in StdImageProcessor.
|
pure virtual |
perform the image calculation here
Implemented in StdImageProcessor.
 1.8.6
1.8.6 
