|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
#include <assert.h>#include <osg/Texture2D>#include <osg/Geode>#include <osg/ShapeDrawable>#include <osg/MatrixTransform>#include <osgDB/ReadFile>#include <osg/Geometry>#include <osg/Material>#include <osg/TexEnv>#include <osg/AlphaFunc>#include "osgprimitive.h"#include <selforg/stl_adds.h>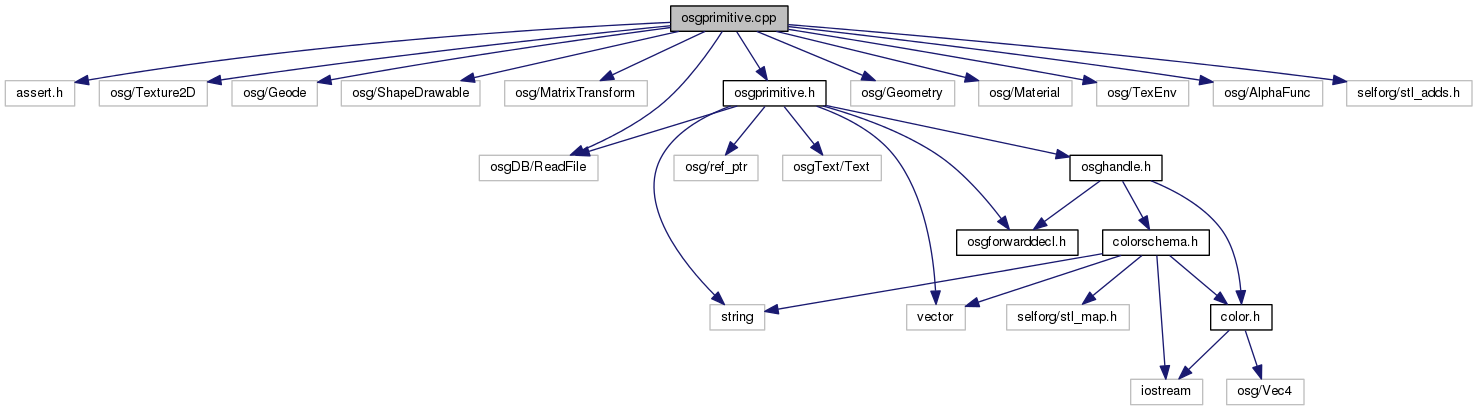
Namespaces | |
| lpzrobots | |
| forward declarations | |
Functions | |
| ref_ptr< Material > | getMaterial (const Color &c, Material::ColorMode mode=Material::AMBIENT_AND_DIFFUSE) |
| osg::Geode * | createRectangle (const OsgHandle &, const osg::Vec3 &v1, const osg::Vec3 &v2, const osg::Vec3 &v3, double repeatOnR, double repeatOnS) |
| void | addTexture (Geode *geode, const TextureDescr &tex) |
| Geode * | test () |
 1.8.6
1.8.6 
