|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
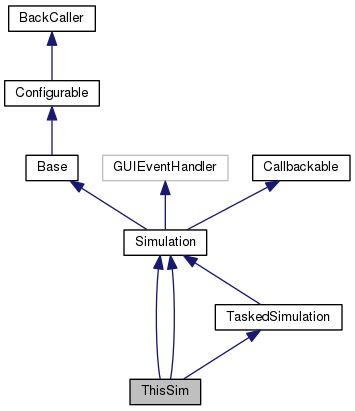
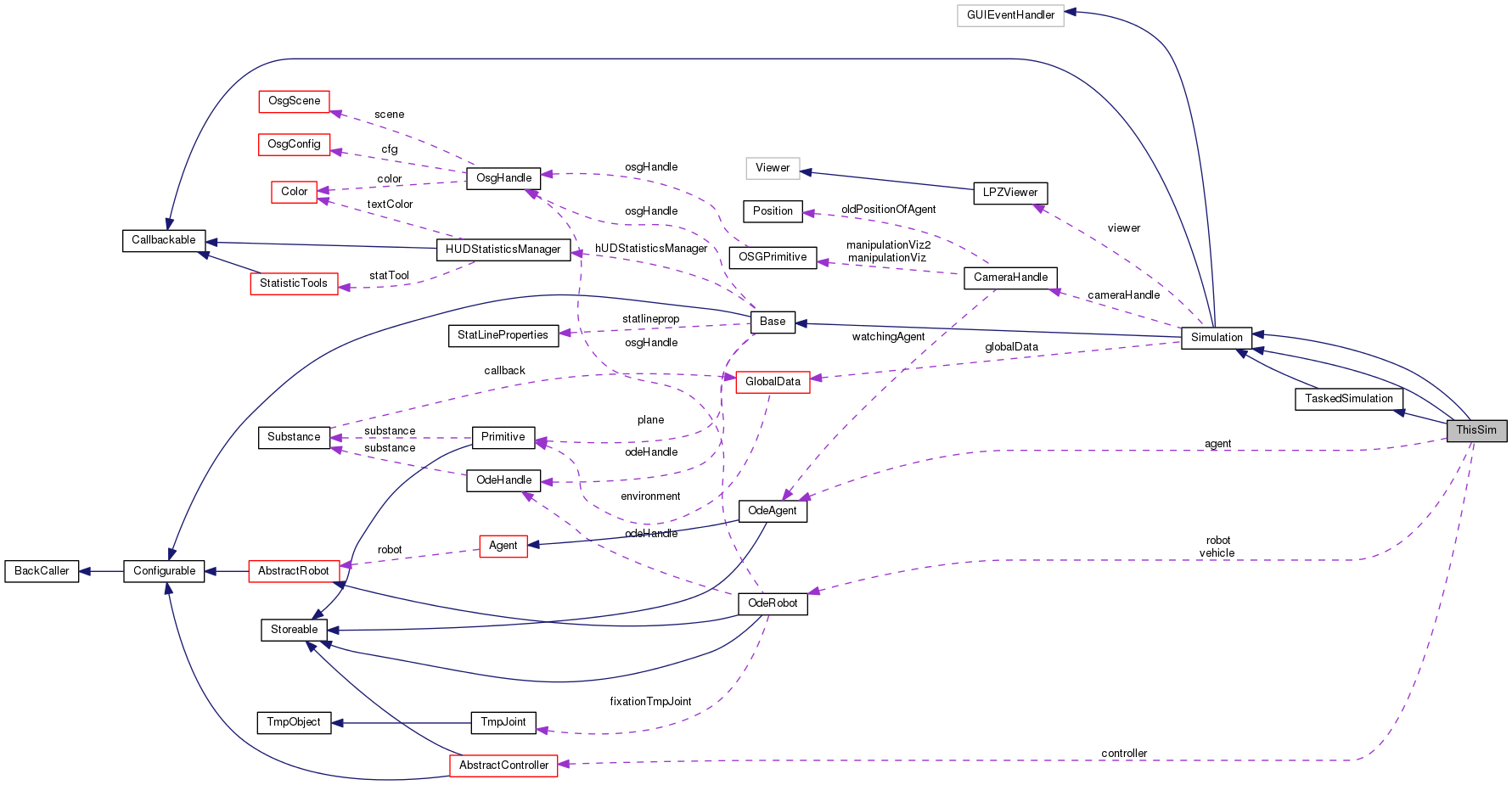
Just create your own simulation, it's up to you. More...
Public Member Functions | |
| ThisSim () | |
| ~ThisSim () | |
| virtual void | start (const OdeHandle &odeHandle, const OsgHandle &osgHandle, GlobalData &global) |
| start() is called at the start and should create all the object (obstacles, agents...). More... | |
| virtual void | addCallback (GlobalData &globalData, bool draw, bool pause, bool control) |
| optional additional callback function which is called every simulation step. More... | |
| virtual bool | command (const OdeHandle &, const OsgHandle &, GlobalData &globalData, int key, bool down) |
| is called if a key was pressed. More... | |
| virtual void | bindingDescription (osg::ApplicationUsage &au) const |
| this can be used to describe the key bindings used by command() More... | |
| void | start (const OdeHandle &odeHandle, const OsgHandle &osgHandle, GlobalData &global) |
| start() is called at the first start of the cycles and should create all the object (obstacles, agents...). More... | |
| virtual bool | command (const OdeHandle &, const OsgHandle &, GlobalData &globalData, int key, bool down) |
| is called if a key was pressed. More... | |
| virtual void | bindingDescription (osg::ApplicationUsage &au) const |
| this can be used to describe the key bindings used by command() More... | |
| virtual void | usage () const |
| this can be used to print additional usage information (cmd-line options) More... | |
| void | start (const OdeHandle &odeHandle, const OsgHandle &osgHandle, GlobalData &global, SimulationTaskHandle &sTHandle, int taskId) |
| starting function (executed once at the beginning of the simulation loop/first cycle) This function contains the additional parameters simTaskHandle and taskId, with these you have access to your global data. More... | |
| virtual bool | restart (const OdeHandle &odeHandle, const OsgHandle &osgHandle, GlobalData &global, SimulationTaskHandle &sTHandle, int taskId) |
| restart() is called at the second and all following starts of the cylce The end of a cycle is determined by (simulation_time_reached==true) More... | |
| virtual void | addCallback (GlobalData &globalData, bool draw, bool pause, bool control) |
| optional additional callback function which is called every simulation step. More... | |
| virtual bool | command (const OdeHandle &, const OsgHandle &, GlobalData &globalData, int key, bool down, SimulationTaskHandle &sTHandle, int taskI) |
| is called if a key was pressed. More... | |
 Public Member Functions inherited from TaskedSimulation Public Member Functions inherited from TaskedSimulation | |
| TaskedSimulation () | |
| virtual | ~TaskedSimulation () |
| virtual void | addCallback (GlobalData &globalData, bool draw, bool pause, bool control, SimulationTaskHandle &, int taskId) |
| optional additional callback function which is called every simulation step. More... | |
| void | setTaskId (int taskId) |
| Sets the taskId of the associated SimulationTask. More... | |
| void | setTaskNameSuffix (std::string nameSuffix) |
| void | setSimTaskHandle (SimulationTaskHandle &simTaskHandle) |
| Sets the global SimulationTaskHandle. More... | |
| Public Member Functions inherited from Simulation | |
| Simulation () | |
| virtual | ~Simulation () |
| bool | run (int argc, char **argv) |
| starts the Simulation. More... | |
| virtual void | end (GlobalData &globalData) |
| end() is called at the end and should tidy up More... | |
| virtual bool | config (GlobalData &globalData) |
| config() is called when the user presses Ctrl-C More... | |
| virtual bool | collCallback (const OdeHandle &, void *data, dGeomID o1, dGeomID o2) |
| collCallback() can be used to overload the standart collision handling. More... | |
| virtual void | addPaletteFile (const std::string &filename, bool verbose=false) |
| adds a palette file to be loaded at initialization time Call this before run()! More... | |
| virtual void | addColorAliasFile (const std::string &filename, bool verbose=false) |
| adds a color alias file to be loaded at initialization time Call this before run()! More... | |
| virtual void | odeStep () |
| virtual void | osgStep () |
| virtual void | doOnCallBack (BackCaller *src, BackCaller::CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) override |
| This method is invoked when a callback is done from the class where this class is for callback registered. More... | |
| Public Member Functions inherited from Base | |
| Base (const std::string &caption="LpzRobots Simulator (Martius et al)") | |
| virtual void | makePhysicsScene () |
| create the ground plane More... | |
| virtual void | makeScene (OsgScene *scene, const OsgConfig &config) |
| creates the base scene graph with world, sky and floor and shadow and HUD and stores it in scene More... | |
| virtual osg::Node * | makeSky (const OsgConfig &config) |
| virtual osg::Node * | makeGround (const OsgConfig &config) |
| virtual osg::Node * | createHUD (OsgScene *scene, const OsgConfig &config) |
| creates hud and is supposed to return the camera to it and adds the geode of the hud to the scene More... | |
| virtual void | createHUDManager (osg::Geode *geode, osgText::Font *font) |
| virtual void | makeLights (osg::Group *node, const OsgConfig &config) |
| adds light to the node More... | |
| virtual osgShadow::ShadowedScene * | createShadowedScene (osg::Node *sceneToShadow, osg::LightSource *lightSource, int shadowType) |
| Shadow types: 1 - ShadowVolume 2 - ShadowTextue 3 - ParallelSplitShadowMap 4 - SoftShadowMap 5 - ShadowMap. More... | |
| virtual void | setGroundTexture (const char *filename) |
| virtual Substance | getGroundSubstance () |
| virtual void | setGroundSubstance (const Substance &substance) |
| virtual void | setCaption (const std::string &caption) |
| sets the cpation that is printed at the right of the status line More... | |
| virtual void | setTitle (const std::string &title) |
| sets the title that is printed in the center of the status line More... | |
| virtual StatLineProperties | getStatLineProperties () |
| virtual void | setStatLineProperties (const StatLineProperties &statlineprop) |
| sets the properties of the status line, do it before the scene is initialized More... | |
| virtual HUDStatisticsManager * | getHUDSM () |
| Create HUDStatisticsManager and register it for being called back every step. More... | |
| virtual | ~Base () |
| Public Member Functions inherited from Configurable | |
| Configurable () | |
| Configurable (const std::string &name, const std::string &revision) | |
| intialise with name and revision (use "$ID$") More... | |
| virtual | ~Configurable () |
| virtual void | notifyOnChange (const paramkey &key) |
| Is called when a parameter was changes via setParam(). More... | |
| virtual void | addParameter (const paramkey &key, paramval *val, paramval minBound, paramval maxBound, const paramdescr &descr=paramdescr()) |
| This is the new style for adding configurable parameters. More... | |
| virtual void | addParameter (const paramkey &key, paramval *val, const paramdescr &descr=paramdescr()) |
| See addParameter(const paramkey& key, paramval* val, paramval minBound, paramval maxBound, const paramdescr& descr) More... | |
| virtual void | addParameter (const paramkey &key, parambool *val, const paramdescr &descr=paramdescr()) |
| See addParameter(const paramkey& key, paramval* val) but for bool values. More... | |
| virtual void | addParameter (const paramkey &key, paramint *val, paramint minBound, paramint maxBound, const paramdescr &descr=paramdescr()) |
| See addParameter(const paramkey& key, paramval* val) but for int values. More... | |
| virtual void | addParameter (const paramkey &key, paramint *val, const paramdescr &descr=paramdescr()) |
| virtual void | addParameterDef (const paramkey &key, paramval *val, paramval def, paramval minBound, paramval maxBound, const paramdescr &descr=paramdescr()) |
| This function is only provided for convenience. More... | |
| virtual void | addParameterDef (const paramkey &key, paramval *val, paramval def, const paramdescr &descr=paramdescr()) |
| virtual void | addParameterDef (const paramkey &key, parambool *val, parambool def, const paramdescr &descr=paramdescr()) |
| See addParameterDef(const paramkey&, paramval*, paramval) More... | |
| virtual void | addParameterDef (const paramkey &key, paramint *val, paramint def, paramint minBound, paramint maxBound, const paramdescr &descr=paramdescr()) |
| See addParameterDef(const paramkey&, paramval*, paramval) More... | |
| virtual void | addParameterDef (const paramkey &key, paramint *val, paramint def, const paramdescr &descr=paramdescr()) |
| virtual void | setParamDescr (const paramkey &key, const paramdescr &descr, bool traverseChildren=true) |
| sets a description for the given parameter More... | |
| int | getId () const |
| return the id of the configurable objects, which is created by random on initialisation More... | |
| virtual paramkey | getName () const |
| return the name of the object More... | |
| virtual paramkey | getRevision () const |
| returns the revision of the object More... | |
| virtual void | setName (const paramkey &name, bool callSetNameOfInspectable=true) |
| Sets the name of the configurable. More... | |
| virtual void | setRevision (const paramkey &revision) |
| sets the revision Hint: { return "$ID$"; } More... | |
| virtual paramval | getParam (const paramkey &key, bool traverseChildren=true) const |
| returns the value of the requested parameter or 0 (+ error message to stderr) if unknown. More... | |
| virtual bool | hasParam (const paramkey &key, bool traverseChildren=true) const |
| Returns if the requested parameter is part of the configurable or their children. More... | |
| virtual bool | setParam (const paramkey &key, paramval val, bool traverseChildren=true) |
| sets the value of the given parameter or does nothing if unknown. More... | |
| virtual void | setParamBounds (const paramkey &key, paramval minBound, paramval maxBound, bool traverseChildren=true) |
| Sets the bounds (minBound and maxBound) of the given parameter. More... | |
| virtual void | setParamBounds (const paramkey &key, paramint minBound, paramint maxBound, bool traverseChildren=true) |
| virtual void | setParamBounds (const paramkey &key, paramvalBounds bounds, bool traverseChildren=true) |
| virtual void | setParamBounds (const paramkey &key, paramintBounds bounds, bool traverseChildren=true) |
| virtual paramlist | getParamList () const |
| The list of all parameters with there value as allocated lists. More... | |
| virtual std::list< paramkey > | getAllParamNames (bool traverseChildren=true) |
| returns all names that are configureable More... | |
| virtual parammap | getParamValMap () const |
| virtual paramintmap | getParamIntMap () const |
| virtual paramboolmap | getParamBoolMap () const |
| virtual paramdescr | getParamDescr (const paramkey &key, bool traverseChildren=true) const |
| returns the description for the given parameter More... | |
| virtual paramvalBounds | getParamvalBounds (const paramkey &key, bool traverseChildren=true) const |
| virtual paramintBounds | getParamintBounds (const paramkey &key, bool traverseChildren=true) const |
| virtual bool | hasParamDescr (const paramkey &key, bool traverseChildren=true) const |
| virtual bool | hasParamvalBounds (const paramkey &key, bool traverseChildren=true) const |
| virtual bool | hasParamintBounds (const paramkey &key, bool traverseChildren=true) const |
| void | print (FILE *f, const char *prefix, int columns=90, bool traverseChildren=true) const |
| prints the keys, values and descriptions to the file. Each line is prefixed More... | |
| bool | parse (FILE *f, const char *prefix=0, bool traverseChildren=true) |
| parses the configuration from the given file More... | |
| virtual void | addConfigurable (Configurable *conf) |
| Adds a configurable as a child object. More... | |
| virtual void | removeConfigurable (Configurable *conf) |
| Removes a configurable as a child object. More... | |
| virtual const configurableList & | getConfigurables () const |
| Returns the list containing all configurable children. More... | |
| virtual void | configurableChanged () |
| Indicates that the configurable itself or the configurable children attached to this configurable have changed. More... | |
| Public Member Functions inherited from BackCaller | |
| BackCaller () | |
| virtual | ~BackCaller () |
| virtual void | addCallbackable (Callbackable *callbackableInstance, CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| Adds a Callbackable instance to this caller instance. More... | |
| virtual void | removeCallbackable (Callbackable *callbackableInstance, CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| Removes a Callbackable instance from this caller instance. More... | |
| virtual void | removeAllCallbackables (CallbackableType type) |
| Removes all Callbackable instances from this caller instance. More... | |
| virtual void | callBack (CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| Calls all registered callbackable classes of the determined type. More... | |
| virtual void | callBackQMP (CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| Calls all registered callbackable classes of the determined type. More... | |
| Public Member Functions inherited from Callbackable | |
| Callbackable () | |
| virtual | ~Callbackable () |
Public Attributes | |
| AbstractController * | controller |
| OdeRobot * | robot |
| OdeRobot * | vehicle |
| OdeAgent * | agent |
Additional Inherited Members | |
| Public Types inherited from Simulation | |
| enum | SimulationState { none, initialised, running, closed } |
| enum | CameraMode { Static =0, Follow, TV, Race } |
| Public Types inherited from Configurable | |
| typedef std::string | paramkey |
| typedef std::string | paramdescr |
| typedef double | paramval |
| typedef std::list< std::pair < paramkey, paramval > > | paramlist |
| typedef std::map< paramkey, paramval * > | parammap |
| typedef bool | parambool |
| typedef std::list< std::pair < paramkey, parambool > > | paramboollist |
| typedef std::map< paramkey, parambool * > | paramboolmap |
| typedef int | paramint |
| typedef std::list< std::pair < paramkey, paramint > > | paramintlist |
| typedef std::map< paramkey, paramint * > | paramintmap |
| typedef std::map< paramkey, paramdescr > | paramdescrmap |
| typedef std::pair< paramval, paramval > | paramvalBounds |
| typedef std::map< paramkey, paramvalBounds > | paramvalBoundsMap |
| typedef std::pair< paramint, paramint > | paramintBounds |
| typedef std::map< paramkey, paramintBounds > | paramintBoundsMap |
| typedef std::pair< paramkey, paramval * > | paramvalpair |
| typedef std::pair< paramkey, parambool * > | paramboolpair |
| typedef std::pair< paramkey, paramint * > | paramintpair |
| typedef std::vector < Configurable * > | configurableList |
| Public Types inherited from BackCaller | |
| typedef unsigned long | CallbackableType |
| Static Public Member Functions inherited from Base | |
| static int | contains (char **list, int len, const char *str) |
| returns the index+1 if the list contains the given string or 0 if not More... | |
| Static Public Attributes inherited from Base | |
| static const int | PHYSICS_CALLBACKABLE = 1 |
| called each ode/physics step More... | |
| static const int | GRAPHICS_CALLBACKABLE = 2 |
| called each osg/draw step More... | |
| Static Public Attributes inherited from Configurable | |
| static const CallbackableType | CALLBACK_CONFIGURABLE_CHANGED = 11 |
| Static Public Attributes inherited from BackCaller | |
| static const CallbackableType | DEFAULT_CALLBACKABLE_TYPE = 0 |
| This is the default Callbackable type. More... | |
| Protected Member Functions inherited from Simulation | |
| virtual bool | handle (const osgGA::GUIEventAdapter &ea, osgGA::GUIActionAdapter &) |
| virtual void | getUsage (osg::ApplicationUsage &au) const |
| virtual void | accept (osgGA::GUIEventHandlerVisitor &v) |
| virtual bool | init (int argc, char **argv) |
| virtual void | updateGraphics () |
| update the graphics objects More... | |
| void | setCameraHomePos (const osg::Vec3 &eye, const osg::Vec3 &view) |
| define the home position and view orientation of the camera. More... | |
| void | setCameraMode (CameraMode mode) |
| Sets the mode of the camera, the numbers are the same like the keys. More... | |
| bool | startVideoRecording (const char *name) |
| start video recording (write frames to name(XXX) folder) More... | |
| bool | stopVideoRecording () |
| stop video recording More... | |
| void | setWatchedAgent (OdeAgent *agent) |
| Sets the agent to be watched with the camera. More... | |
| OdeAgent * | getWatchedAgent () const |
| returns the watched agent (or 0) More... | |
| bool | control_c_pressed () |
| __attribute__ ((deprecated)) void showParams(const ConfigList &configs) | |
| shows all parameters of all given configurable objects More... | |
| void | resetSyncTimer () |
| long | timeOfDayinMS () |
| std::list< std::pair < std::string, double > > | parseKeyValuePairs (std::string kv) |
| Protected Member Functions inherited from Base | |
| virtual void | setTimeStats (double time, double realtimefactor, double truerealtimefactor, bool pause) |
| virtual void | changeShadowTechnique () |
| Changes the currently used shadow technique. More... | |
| virtual void | base_close () |
| deletes the stuff that is created on makescene and the like More... | |
| Protected Member Functions inherited from Configurable | |
| void | copyParameters (const Configurable &, bool traverseChildren=true) |
| copies the internal params of the given configurable More... | |
| void | printdescr (FILE *f, const char *prefix, const paramkey &key, int columns, int indent) const |
| Static Protected Member Functions inherited from Simulation | |
| static void | nearCallback_TopLevel (void *data, dGeomID o1, dGeomID o2) |
| static void | nearCallback (void *data, dGeomID o1, dGeomID o2) |
| Protected Attributes inherited from Simulation | |
| std::list< PlotOption > & | plotoptions |
| GlobalData | globalData |
| osg::ref_ptr< VideoStream > | videostream |
| long | realtimeoffset |
| long | simtimeoffset |
| double | truerealtimefactor |
| bool | justresettimes |
| bool | drawContacts |
| paramint | windowWidth |
| paramint | windowHeight |
| paramint | defaultFPS |
| bool | pause |
| bool | simulation_time_reached |
| long int | simulation_time |
| bool | noGraphics |
| bool | useKeyHandler |
| int | guiloggerinterval |
| int | filelogginginterval |
| int | matrixvizinterval |
| std::string | initConfParams |
| parameters for configurables set on commandline More... | |
| char | odeRobotsCfg [256] |
| int | currentCycle |
| < filename of config file More... | |
| CameraHandle | cameraHandle |
| parambool | useOdeThread |
| parambool | useOsgThread |
| parambool | useQMPThreads |
| parambool | inTaskedMode |
| std::string | windowName |
| SimulationState | state |
| osg::ArgumentParser * | arguments |
| LPZViewer * | viewer |
| osgGA::KeySwitchMatrixManipulator * | keyswitchManipulator |
| char ** | orig_argv |
| std::list< std::string > | paletteFiles |
| std::list< std::string > | colorAliasFiles |
| bool | verboseColorLoading |
| bool | startConfigurator |
| pthread_t | odeThread |
| pthread_t | osgThread |
| bool | odeThreadCreated |
| bool | osgThreadCreated |
| Protected Attributes inherited from Base | |
| dGeomID | ground |
| OsgHandle | osgHandle |
| OdeHandle | odeHandle |
| std::string | caption |
| std::string | title |
| std::string | groundTexture |
| osg::Group * | dummy |
| osg::Node * | hud |
| osgText::Text * | timestats |
| osgText::Text * | captionline |
| osgText::Text * | titleline |
| StatLineProperties | statlineprop |
| Primitive * | plane |
| HUDStatisticsManager * | hUDStatisticsManager |
| this manager provides methods for displaying statistics on the graphical window! More... | |
| int | ReceivesShadowTraversalMask |
| int | CastsShadowTraversalMask |
| int | shadowTexSize |
| bool | useNVidia |
| Static Protected Attributes inherited from Simulation | |
| static int | ctrl_C = 0 |
Just create your own simulation, it's up to you.
It's essential that your simulation is deduced from TaskedSimulation instead of Simulation. With this little change you have access to the taskId and the global simTaskHandle.
|
inline |
|
inline |
|
inlinevirtual |
optional additional callback function which is called every simulation step.
Called between physical simulation step and drawing.
| draw | indicates that objects are drawn in this timestep |
| pause | always false (only called of simulation is running) |
| control | indicates that robots have been controlled this timestep |
Reimplemented from Simulation.
|
inlinevirtual |
optional additional callback function which is called every simulation step.
Called between physical simulation step and drawing.
| draw | indicates that objects are drawn in this timestep |
| pause | always false (only called of simulation is running) |
| control | indicates that robots have been controlled this timestep |
Reimplemented from Simulation.
|
inlinevirtual |
this can be used to describe the key bindings used by command()
Reimplemented from Simulation.
|
inlinevirtual |
this can be used to describe the key bindings used by command()
Reimplemented from Simulation.
|
inlinevirtual |
is called if a key was pressed.
For keycodes see: osgGA::GUIEventAdapter
Reimplemented from Simulation.
|
inlinevirtual |
is called if a key was pressed.
For keycodes see: osgGA::GUIEventAdapter
Reimplemented from Simulation.
|
inlinevirtual |
is called if a key was pressed.
For keycodes see: osgGA::GUIEventAdapter
Reimplemented from TaskedSimulation.
|
inlinevirtual |
restart() is called at the second and all following starts of the cylce The end of a cycle is determined by (simulation_time_reached==true)
| the | odeHandle |
| the | osgHandle |
| globalData |
Reimplemented from TaskedSimulation.
|
inlinevirtual |
start() is called at the start and should create all the object (obstacles, agents...).
New robot instance
Environment and obstacles
Implements Simulation.
|
inlinevirtual |
start() is called at the first start of the cycles and should create all the object (obstacles, agents...).
Implements Simulation.
|
inlinevirtual |
starting function (executed once at the beginning of the simulation loop/first cycle) This function contains the additional parameters simTaskHandle and taskId, with these you have access to your global data.
Reimplemented from TaskedSimulation.
|
inlinevirtual |
this can be used to print additional usage information (cmd-line options)
Reimplemented from Simulation.
| OdeAgent* agent |
| AbstractController* controller |
| OdeRobot* robot |
| OdeRobot* vehicle |
 1.8.6
1.8.6 
