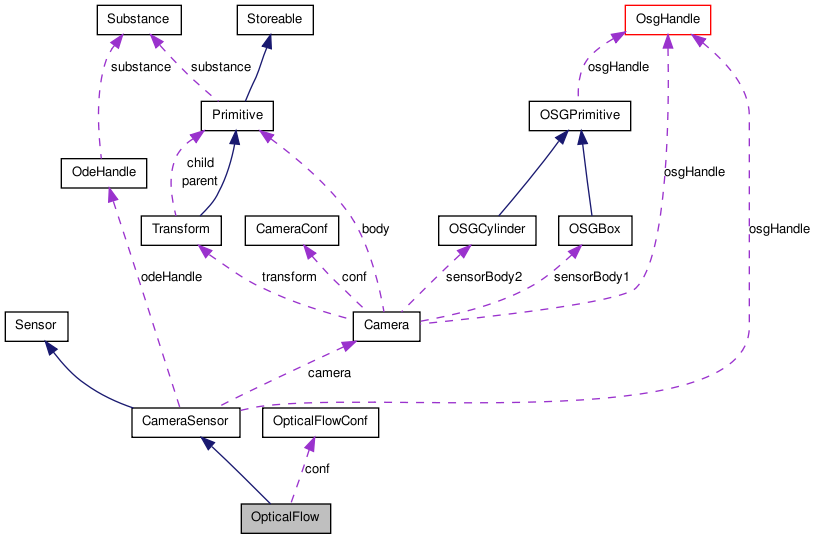
OpticalFlow Class Reference
This CameraSensor calculates the optical flow at few points of the image based on a box matching technique. More...
#include <opticalflow.h>
Inherits lpzrobots::CameraSensor.
Classes | |
| struct | Vec2i |
Public Types | |
| typedef std::list< std::pair < Vec2i, int > > | FlowDelList |
Public Member Functions | |
| OpticalFlow (OpticalFlowConf conf=getDefaultConf()) | |
| virtual | ~OpticalFlow () |
| virtual void | intern_init () |
| overload this function to initialized you data structures. | |
| virtual bool | sense (const GlobalData &globaldata) |
| Performs the calculations. | |
| virtual int | getSensorNumber () const |
| overload this function and return the number of sensor values | |
| virtual int | get (sensor *sensors, int length) const |
| overload this function and return the sensor values | |
Static Public Member Functions | |
| static std::list< Pos > | getDefaultPoints (int num) |
| calculates default positions for optical flow detection. | |
| static OpticalFlowConf | getDefaultConf () |
| the default config has 2 points in and calculates the flow in X and Y | |
Protected Member Functions | |
| Vec2i | calcFieldTransRGB (const Vec2i &field, const osg::Image *current, const osg::Image *last, double &minerror) const |
| calculates the optimal transformation for one field in RGB using all three color channels | |
Static Protected Member Functions | |
| static double | compareSubImg (const unsigned char *const I1, const unsigned char *const I2, const Vec2i &field, int size, int width, int height, int bytesPerPixel, int d_x, int d_y) |
| compares a small part of two given images and returns the average absolute difference. | |
Protected Attributes | |
| OpticalFlowConf | conf |
| int | num |
| std::list< Vec2i > | fields |
| sensor * | data |
| osg::Image * | lasts [4] |
| std::vector< Vec2i > | oldFlows |
| int | maxShiftX |
| int | maxShiftY |
| int | width |
| int | height |
| int | cnt |
| double | avgerror |
Detailed Description
This CameraSensor calculates the optical flow at few points of the image based on a box matching technique.
This can be applied directly to the camera image.
Member Typedef Documentation
| typedef std::list< std::pair<Vec2i,int> > FlowDelList |
Constructor & Destructor Documentation
| OpticalFlow | ( | OpticalFlowConf | conf = getDefaultConf() |
) |
- See also:
- CameraSensor for further parameter explanation.
| ~OpticalFlow | ( | ) | [virtual] |
Member Function Documentation
| OpticalFlow::Vec2i calcFieldTransRGB | ( | const Vec2i & | field, | |
| const osg::Image * | current, | |||
| const osg::Image * | last, | |||
| double & | minerror | |||
| ) | const [protected] |
calculates the optimal transformation for one field in RGB using all three color channels
- Parameters:
-
minerror (is to return the minimum error achieved during the matching)
| double compareSubImg | ( | const unsigned char *const | I1, | |
| const unsigned char *const | I2, | |||
| const Vec2i & | field, | |||
| int | size, | |||
| int | width, | |||
| int | height, | |||
| int | bytesPerPixel, | |||
| int | d_x, | |||
| int | d_y | |||
| ) | [static, protected] |
compares a small part of two given images and returns the average absolute difference.
Field center, size and shift have to be choosen, so that no clipping is required!
- Parameters:
-
field specifies position(center) of subimage to use for comparison size specifies the size of the field edged in pixels d_x shift in x direction d_y shift in y direction
| int get | ( | sensor * | sensors, | |
| int | length | |||
| ) | const [virtual] |
overload this function and return the sensor values
Implements CameraSensor.
| static OpticalFlowConf getDefaultConf | ( | ) | [inline, static] |
the default config has 2 points in and calculates the flow in X and Y
| list< Pos > getDefaultPoints | ( | int | num | ) | [static] |
calculates default positions for optical flow detection.
The points are in aranged horizontally in a line at the vertical center. For num 2 the points are at the border, 3 points there is additioanlly one is the center and so on.
| virtual int getSensorNumber | ( | ) | const [inline, virtual] |
overload this function and return the number of sensor values
Implements CameraSensor.
| void intern_init | ( | ) | [virtual] |
overload this function to initialized you data structures.
Use camera->getImage() to get the image from the camera
Implements CameraSensor.
| bool sense | ( | const GlobalData & | globaldata | ) | [virtual] |
Performs the calculations.
Implements CameraSensor.
Member Data Documentation
double avgerror [protected] |
int cnt [protected] |
OpticalFlowConf conf [protected] |
int height [protected] |
osg::Image* lasts[4] [protected] |
int maxShiftX [protected] |
int maxShiftY [protected] |
int num [protected] |
int width [protected] |
The documentation for this class was generated from the following files:
