OctaPlayground Class Reference
#include <octaplayground.h>
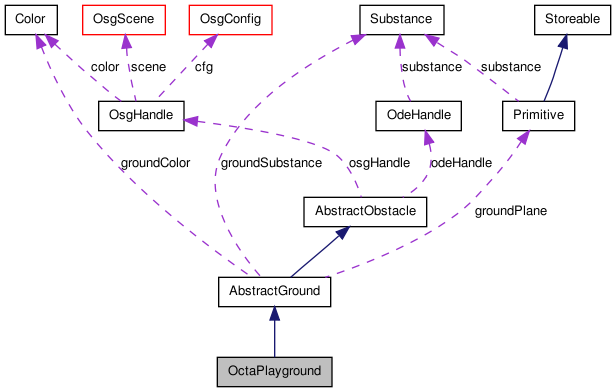
Inherits lpzrobots::AbstractGround.
Collaboration diagram for OctaPlayground:
Public Member Functions | |
| OctaPlayground (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const Pos &geometry=Pos(7, 0.2, 0.5), int numberCorners=8, bool createGround=true) | |
Protected Member Functions | |
| virtual void | create () |
| overload this function to create the obstactle. All primitives should go into the list "obst" | |
| virtual void | calcBoxLength () |
Protected Attributes | |
| double | radius |
| double | width |
| double | height |
| int | number_elements |
| double | angle |
| double | box_length |
Detailed Description
- Examples:
Constructor & Destructor Documentation
| OctaPlayground | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| const Pos & | geometry = Pos(7,0.2,0.5), |
|||
| int | numberCorners = 8, |
|||
| bool | createGround = true | |||
| ) | [inline] |
Member Function Documentation
| virtual void calcBoxLength | ( | ) | [inline, protected, virtual] |
| virtual void create | ( | ) | [inline, protected, virtual] |
overload this function to create the obstactle. All primitives should go into the list "obst"
Implements AbstractObstacle.
Member Data Documentation
double angle [protected] |
double box_length [protected] |
double height [protected] |
int number_elements [protected] |
double radius [protected] |
double width [protected] |
The documentation for this class was generated from the following file:
