MotionCameraSensor Class Reference
This CameraSensor calculates the global optical flow of the camera image using the center of gravity method. More...
#include <camerasensors.h>
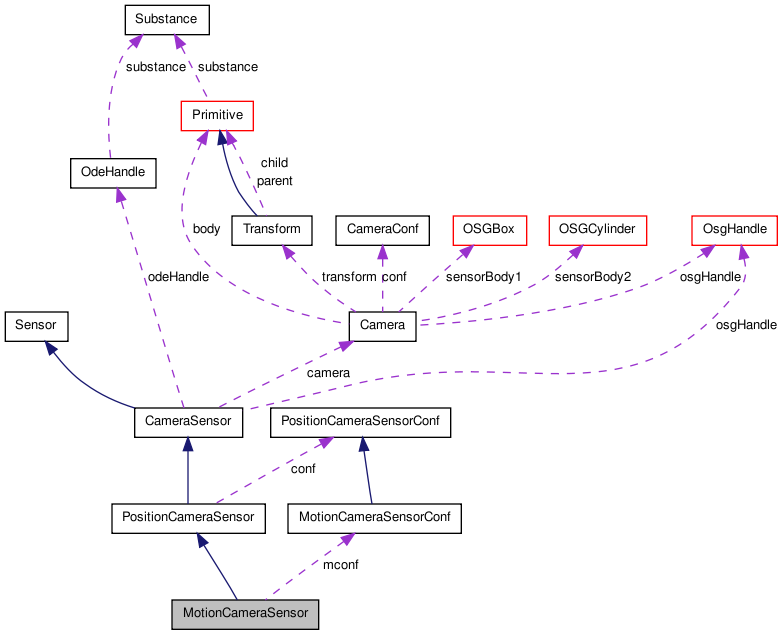
Inherits lpzrobots::PositionCameraSensor.
Public Member Functions | |
| MotionCameraSensor (const MotionCameraSensorConf &mconf=getDefaultConf()) | |
| The camera image should be black and white (e.g. | |
| virtual | ~MotionCameraSensor () |
| virtual bool | sense (const GlobalData &globaldata) |
| Performs the calculations. | |
| double | windowfunc (double x) |
| window function for the interval -1 to 1, with ramps from 0.5 off center | |
Static Public Member Functions | |
| static MotionCameraSensorConf | getDefaultConf () |
Protected Attributes | |
| MotionCameraSensorConf | mconf |
| double | lambda |
| bool | last |
| whether last image had a valid position | |
| double | lastX |
| double | lastY |
Detailed Description
This CameraSensor calculates the global optical flow of the camera image using the center of gravity method.
It requires objects to be bright on black ground. The velocity is by default windowed to avoid step-like artefacts at the border. Probably you want to use an image processor like ColorFilterImgProc before.
Constructor & Destructor Documentation
| MotionCameraSensor | ( | const MotionCameraSensorConf & | mconf = getDefaultConf() |
) | [inline] |
The camera image should be black and white (e.g.
- See also:
- BWImageProcessor or ColorFilterImgProc)
- CameraSensor for further parameter explanation.
- Parameters:
-
mconf configuration object
- See also:
- MotionCameraSensorConf and
- PositionCameraSensorConf
| virtual ~MotionCameraSensor | ( | ) | [inline, virtual] |
Member Function Documentation
| static MotionCameraSensorConf getDefaultConf | ( | ) | [inline, static] |
Reimplemented from PositionCameraSensor.
| virtual bool sense | ( | const GlobalData & | globaldata | ) | [inline, virtual] |
Performs the calculations.
Reimplemented from PositionCameraSensor.
| double windowfunc | ( | double | x | ) | [inline] |
window function for the interval -1 to 1, with ramps from 0.5 off center
Member Data Documentation
double lambda [protected] |
bool last [protected] |
whether last image had a valid position
double lastX [protected] |
double lastY [protected] |
MotionCameraSensorConf mconf [protected] |
The documentation for this class was generated from the following file:
