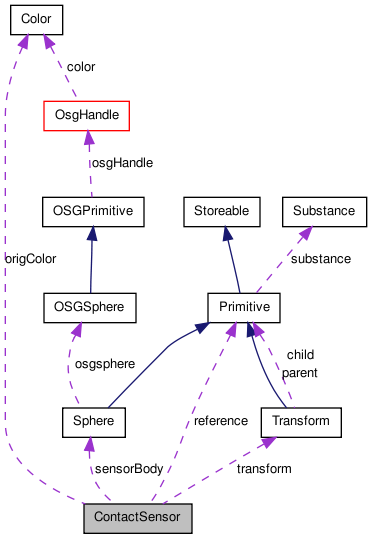
ContactSensor Class Reference
Class for a contact sensor. More...
#include <contactsensor.h>
Public Member Functions | |
| ContactSensor (bool binary=true, double forcescale=1, double radius=0.05) | |
| virtual | ~ContactSensor () |
| virtual void | init (const OdeHandle &odeHandle, const OsgHandle &osgHandle, Primitive *reference, bool createSphere=false, const osg::Matrix pose=osg::Matrix(), bool colorObject=true) |
| virtual void | reset () |
| virtual double | get () |
| returns the sensor value in the range >=0; 0 means nothing no contact >0 means contact with another object: size is the force in arbitrary unit | |
| virtual void | update () |
| virtual void | setDepth (float depth) |
| Transform * | getTransformObject () |
Protected Attributes | |
| bool | binary |
| if contact sensor is a switch | |
| double | forcescale |
| double | value |
| actual sensor value | |
| double | lastvalue |
| last value | |
| double | size |
| size of graphical sensor | |
| Primitive * | reference |
| primitive to which the sensor is bound | |
| Sphere * | sensorBody |
| Transform * | transform |
| bool | colorObject |
| Color | origColor |
| bool | initialised |
Detailed Description
Class for a contact sensor.
The sensor is on if a collision occurs and stores the penetration depth (as a crude measure for the colission force). It can be either attached to an existing primitive (e.g. a leg) or create its own sensor object. The latter is recommended if you want very localized force sensors. The information of a collision comes to the sensor via the collision callback of the substance used for the primitive. However of no collision is detected the sensor needs to ajust its output as well. Therefore a reset function is provided.
Constructor & Destructor Documentation
| ContactSensor | ( | bool | binary = true, |
|
| double | forcescale = 1, |
|||
| double | radius = 0.05 | |||
| ) |
- Parameters:
-
binary if true then the sensor is 0 or 1 (for contact), no force value returned forcescale scale of the measured collision force (default: 1) size size of little box representing the sensor (if it has an own body) (default: 0.05)
| ~ContactSensor | ( | ) | [virtual] |
Member Function Documentation
| double get | ( | ) | [virtual] |
returns the sensor value in the range >=0; 0 means nothing no contact >0 means contact with another object: size is the force in arbitrary unit
- See also:
- characteritic()
| Transform * getTransformObject | ( | ) |
| void init | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| Primitive * | reference, | |||
| bool | createSphere = false, |
|||
| const osg::Matrix | pose = osg::Matrix(), |
|||
| bool | colorObject = true | |||
| ) | [virtual] |
| void reset | ( | ) | [virtual] |
| void setDepth | ( | float | depth | ) | [virtual] |
| void update | ( | ) | [virtual] |
Member Data Documentation
bool binary [protected] |
if contact sensor is a switch
bool colorObject [protected] |
double forcescale [protected] |
bool initialised [protected] |
double lastvalue [protected] |
last value
Sphere* sensorBody [protected] |
double size [protected] |
size of graphical sensor
double value [protected] |
actual sensor value
The documentation for this class was generated from the following files:
