Boxpile Class Reference
#include <boxpile.h>
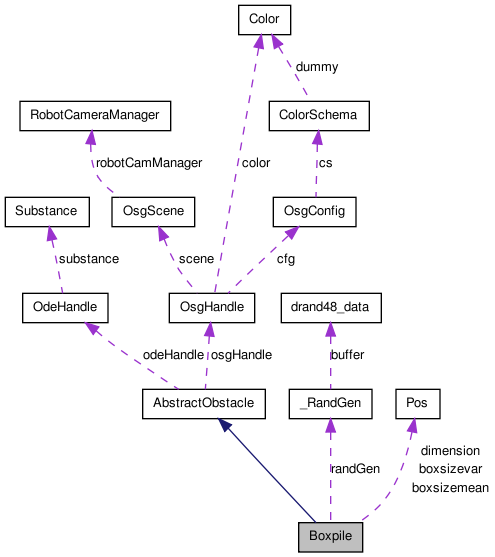
Inherits lpzrobots::AbstractObstacle.
Collaboration diagram for Boxpile:
Public Member Functions | |
| Boxpile (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const osg::Vec3 &dimension=osg::Vec3(5.0, 5.0, 1.0), int num=30, int seed=1, const osg::Vec3 &boxsizemean=osg::Vec3(1.0, 1.0, 0.2), const osg::Vec3 &boxsizevar=osg::Vec3(0.5, 0.5, 0.1)) | |
| Constructor a random boxpile is fixed to the world. | |
| virtual void | setPose (const osg::Matrix &pose) |
| sets position of the obstacle and creates/recreates obstacle if necessary | |
| virtual Primitive * | getMainPrimitive () const |
| return the "main" primitive of the obtactle. The meaning of "main" is arbitrary | |
Protected Member Functions | |
| virtual void | create () |
| overload this function to create the obstactle. All primitives should go into the list "obst" | |
Detailed Description
Constructor & Destructor Documentation
| Boxpile | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| const osg::Vec3 & | dimension = osg::Vec3(5.0, 5.0, 1.0), |
|||
| int | num = 30, |
|||
| int | seed = 1, |
|||
| const osg::Vec3 & | boxsizemean = osg::Vec3(1.0, 1.0, 0.2), |
|||
| const osg::Vec3 & | boxsizevar = osg::Vec3(0.5, 0.5, 0.1) | |||
| ) | [inline] |
Constructor a random boxpile is fixed to the world.
- Parameters:
-
dimension size of pile (height is always 1, use boxsize and boxvar) num number of boxes seed seed for random generator (it is fixed to generate deterministic piles) boxsizemean mean size of boxes boxsizevar variance of boxes sizes
Member Function Documentation
| virtual void create | ( | ) | [inline, protected, virtual] |
overload this function to create the obstactle. All primitives should go into the list "obst"
Implements AbstractObstacle.
| virtual Primitive* getMainPrimitive | ( | ) | const [inline, virtual] |
return the "main" primitive of the obtactle. The meaning of "main" is arbitrary
Implements AbstractObstacle.
| virtual void setPose | ( | const osg::Matrix & | pose | ) | [inline, virtual] |
sets position of the obstacle and creates/recreates obstacle if necessary
Implements AbstractObstacle.
The documentation for this class was generated from the following file:
