|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
#include <amos4legs.h>
Public Member Functions | |
| Leg () | |
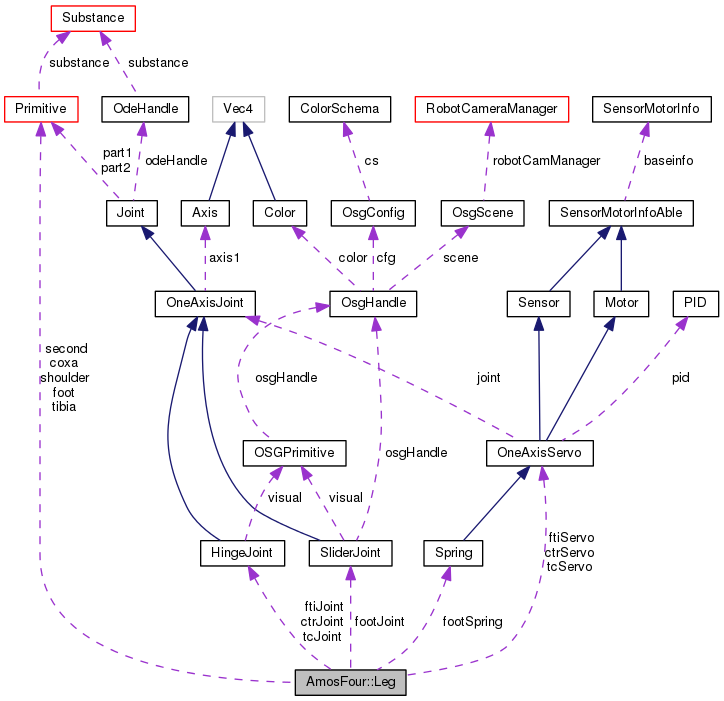
Public Attributes | |
| HingeJoint * | tcJoint |
| HingeJoint * | ctrJoint |
| HingeJoint * | ftiJoint |
| SliderJoint * | footJoint |
| OneAxisServo * | tcServo |
| OneAxisServo * | ctrServo |
| OneAxisServo * | ftiServo |
| Spring * | footSpring |
| Primitive * | shoulder |
| Primitive * | coxa |
| Primitive * | second |
| Primitive * | tibia |
| Primitive * | foot |
| Leg | ( | ) |
| Primitive* coxa |
| HingeJoint* ctrJoint |
| OneAxisServo* ctrServo |
| Primitive* foot |
| SliderJoint* footJoint |
| Spring* footSpring |
| HingeJoint* ftiJoint |
| OneAxisServo* ftiServo |
| Primitive* second |
| Primitive* shoulder |
| HingeJoint* tcJoint |
| OneAxisServo* tcServo |
| Primitive* tibia |
 1.8.6
1.8.6 
