|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
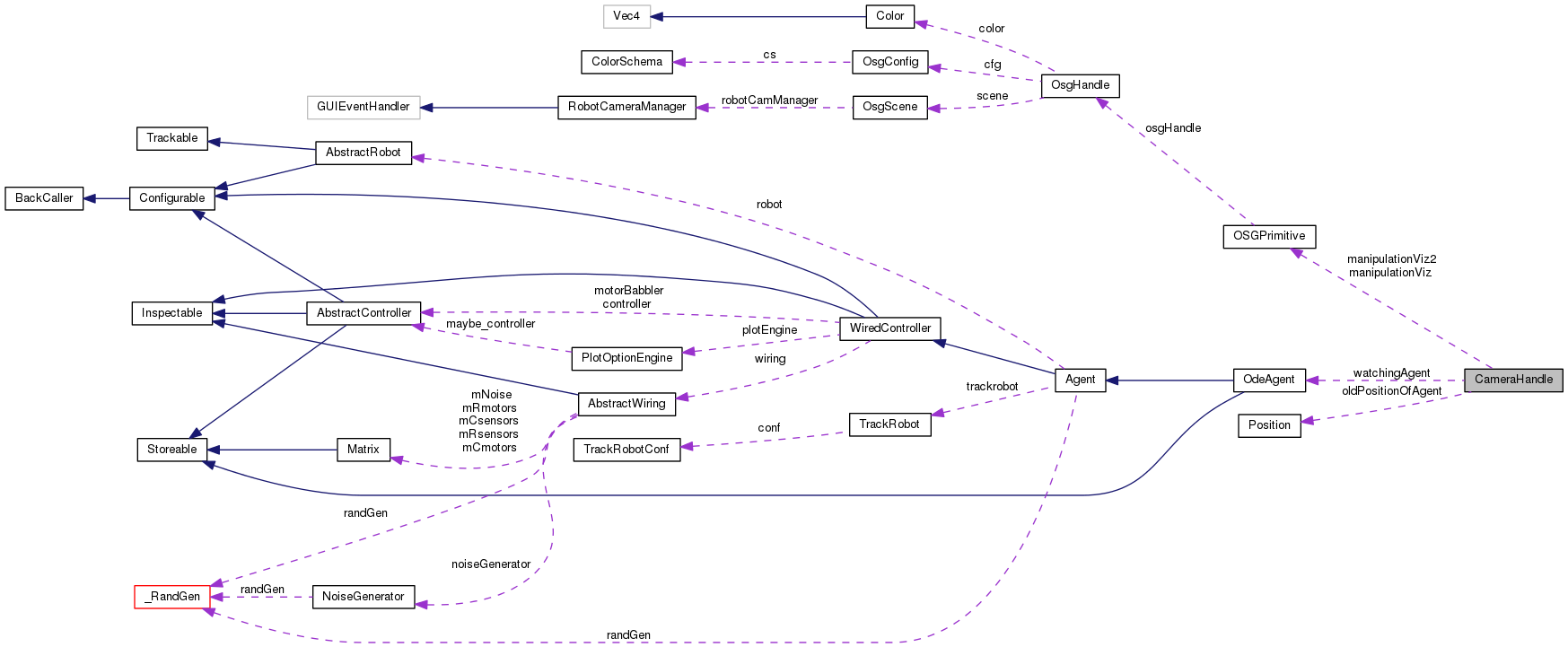
Class which holds all data used by CameraManipulators. More...
#include <camerahandle.h>
Public Types | |
| enum | ManipulationType { No, Translational, TranslationalHorizontal, Rotational } |
Public Member Functions | |
| CameraHandle () | |
| virtual | ~CameraHandle () |
Public Attributes | |
| osg::Vec3 | eye |
| osg::Vec3 | view |
| osg::Vec3 | home_eye |
| osg::Vec3 | home_view |
| osg::Vec3 | desiredEye |
| osg::Vec3 | desiredView |
| bool | home_externally_set |
| OdeAgent * | watchingAgent |
| bool | watchingAgentDefined |
| Position | oldPositionOfAgent |
| bool | oldPositionOfAgentDefined |
| ManipulationType | doManipulation |
| osg::Vec3 | manipulationPoint |
| OSGPrimitive * | manipulationViz |
| OSGPrimitive * | manipulationViz2 |
| double | manipulationForce |
| osg::Camera * | cam |
Class which holds all data used by CameraManipulators.
The avoidance of static variables enables multithreaded (tasked) simulations.
| enum ManipulationType |
| CameraHandle | ( | ) |
|
virtual |
| osg::Camera* cam |
| osg::Vec3 desiredEye |
| osg::Vec3 desiredView |
| ManipulationType doManipulation |
| osg::Vec3 eye |
| bool home_externally_set |
| osg::Vec3 home_eye |
| osg::Vec3 home_view |
| double manipulationForce |
| osg::Vec3 manipulationPoint |
| OSGPrimitive* manipulationViz |
| OSGPrimitive* manipulationViz2 |
| Position oldPositionOfAgent |
| bool oldPositionOfAgentDefined |
| osg::Vec3 view |
| OdeAgent* watchingAgent |
| bool watchingAgentDefined |
 1.8.6
1.8.6 
