|
| | SineController (unsigned long int controlmask=(~0), function func=Sine) |
| |
| virtual void | init (int sensornumber, int motornumber, RandGen *randGen=0) |
| | initialisation of the controller with the given sensor/ motornumber Must be called before use. More...
|
| |
| virtual int | getSensorNumber () const |
| |
| virtual int | getMotorNumber () const |
| |
| virtual void | step (const sensor *sensors, int sensornumber, motor *motors, int motornumber) |
| | performs one step ( the same as StepNoLearning). More...
|
| |
| virtual void | stepNoLearning (const sensor *, int number_sensors, motor *, int number_motors) |
| | performs one step. More...
|
| |
| virtual bool | store (FILE *f) const |
| |
| virtual bool | restore (FILE *f) |
| |
| | AbstractController (const std::string &name, const std::string &revision) |
| | contructor (hint: use $ID$ for revision) More...
|
| |
| virtual void | motorBabblingStep (const sensor *, int number_sensors, const motor *, int number_motors) |
| | called in motor babbling phase. More...
|
| |
| virtual void | sensorInfos (std::list< SensorMotorInfo > sensorInfos) |
| | the controller is notified about the information on sensor. More...
|
| |
| virtual void | motorInfos (std::list< SensorMotorInfo > motorInfos) |
| | the controller is notified about the information on motors. More...
|
| |
| virtual int | SIdx (const std::string &name) |
| | returns the index of the sensor with the given name (if not found then 0 and all sensor names are printed) More...
|
| |
| virtual int | MIdx (const std::string &name) |
| | returns the index of the motor with the given name (if not found then 0 and all motor names are printed) More...
|
| |
| virtual SensorMotorInfo | SInfo (int index) |
| | returns the Information for the sensor with given index More...
|
| |
| virtual SensorMotorInfo | MInfo (int index) |
| | returns the Information for the motor with given index More...
|
| |
| | Configurable () |
| |
| | Configurable (const std::string &name, const std::string &revision) |
| | intialise with name and revision (use "$ID$") More...
|
| |
| virtual | ~Configurable () |
| |
| virtual void | notifyOnChange (const paramkey &key) |
| | Is called when a parameter was changes via setParam(). More...
|
| |
| virtual void | addParameter (const paramkey &key, paramval *val, paramval minBound, paramval maxBound, const paramdescr &descr=paramdescr()) |
| | This is the new style for adding configurable parameters. More...
|
| |
| virtual void | addParameter (const paramkey &key, paramval *val, const paramdescr &descr=paramdescr()) |
| | See addParameter(const paramkey& key, paramval* val, paramval minBound, paramval maxBound, const paramdescr& descr) More...
|
| |
| virtual void | addParameter (const paramkey &key, parambool *val, const paramdescr &descr=paramdescr()) |
| | See addParameter(const paramkey& key, paramval* val) but for bool values. More...
|
| |
| virtual void | addParameter (const paramkey &key, paramint *val, paramint minBound, paramint maxBound, const paramdescr &descr=paramdescr()) |
| | See addParameter(const paramkey& key, paramval* val) but for int values. More...
|
| |
| virtual void | addParameter (const paramkey &key, paramint *val, const paramdescr &descr=paramdescr()) |
| |
| virtual void | addParameterDef (const paramkey &key, paramval *val, paramval def, paramval minBound, paramval maxBound, const paramdescr &descr=paramdescr()) |
| | This function is only provided for convenience. More...
|
| |
| virtual void | addParameterDef (const paramkey &key, paramval *val, paramval def, const paramdescr &descr=paramdescr()) |
| |
| virtual void | addParameterDef (const paramkey &key, parambool *val, parambool def, const paramdescr &descr=paramdescr()) |
| | See addParameterDef(const paramkey&, paramval*, paramval) More...
|
| |
| virtual void | addParameterDef (const paramkey &key, paramint *val, paramint def, paramint minBound, paramint maxBound, const paramdescr &descr=paramdescr()) |
| | See addParameterDef(const paramkey&, paramval*, paramval) More...
|
| |
| virtual void | addParameterDef (const paramkey &key, paramint *val, paramint def, const paramdescr &descr=paramdescr()) |
| |
| virtual void | setParamDescr (const paramkey &key, const paramdescr &descr, bool traverseChildren=true) |
| | sets a description for the given parameter More...
|
| |
| int | getId () const |
| | return the id of the configurable objects, which is created by random on initialisation More...
|
| |
| virtual paramkey | getName () const |
| | return the name of the object More...
|
| |
| virtual paramkey | getRevision () const |
| | returns the revision of the object More...
|
| |
| virtual void | setName (const paramkey &name, bool callSetNameOfInspectable=true) |
| | Sets the name of the configurable. More...
|
| |
| virtual void | setRevision (const paramkey &revision) |
| | sets the revision Hint: { return "$ID$"; } More...
|
| |
| virtual paramval | getParam (const paramkey &key, bool traverseChildren=true) const |
| | returns the value of the requested parameter or 0 (+ error message to stderr) if unknown. More...
|
| |
| virtual bool | hasParam (const paramkey &key, bool traverseChildren=true) const |
| | Returns if the requested parameter is part of the configurable or their children. More...
|
| |
| virtual bool | setParam (const paramkey &key, paramval val, bool traverseChildren=true) |
| | sets the value of the given parameter or does nothing if unknown. More...
|
| |
| virtual void | setParamBounds (const paramkey &key, paramval minBound, paramval maxBound, bool traverseChildren=true) |
| | Sets the bounds (minBound and maxBound) of the given parameter. More...
|
| |
| virtual void | setParamBounds (const paramkey &key, paramint minBound, paramint maxBound, bool traverseChildren=true) |
| |
| virtual void | setParamBounds (const paramkey &key, paramvalBounds bounds, bool traverseChildren=true) |
| |
| virtual void | setParamBounds (const paramkey &key, paramintBounds bounds, bool traverseChildren=true) |
| |
| virtual paramlist | getParamList () const |
| | The list of all parameters with there value as allocated lists. More...
|
| |
| virtual std::list< paramkey > | getAllParamNames (bool traverseChildren=true) |
| | returns all names that are configureable More...
|
| |
| virtual parammap | getParamValMap () const |
| |
| virtual paramintmap | getParamIntMap () const |
| |
| virtual paramboolmap | getParamBoolMap () const |
| |
| virtual paramdescr | getParamDescr (const paramkey &key, bool traverseChildren=true) const |
| | returns the description for the given parameter More...
|
| |
| virtual paramvalBounds | getParamvalBounds (const paramkey &key, bool traverseChildren=true) const |
| |
| virtual paramintBounds | getParamintBounds (const paramkey &key, bool traverseChildren=true) const |
| |
| virtual bool | hasParamDescr (const paramkey &key, bool traverseChildren=true) const |
| |
| virtual bool | hasParamvalBounds (const paramkey &key, bool traverseChildren=true) const |
| |
| virtual bool | hasParamintBounds (const paramkey &key, bool traverseChildren=true) const |
| |
| virtual bool | storeCfg (const char *filenamestem, const std::list< std::string > &comments=std::list< std::string >()) |
| | stores the key values paires into the file : filenamestem.cfg including the comments given in the list More...
|
| |
| virtual bool | restoreCfg (const char *filenamestem) |
| | restores the key values paires from the file : filenamestem.cfg More...
|
| |
| void | print (FILE *f, const char *prefix, int columns=90, bool traverseChildren=true) const |
| | prints the keys, values and descriptions to the file. Each line is prefixed More...
|
| |
| bool | parse (FILE *f, const char *prefix=0, bool traverseChildren=true) |
| | parses the configuration from the given file More...
|
| |
| virtual void | addConfigurable (Configurable *conf) |
| | Adds a configurable as a child object. More...
|
| |
| virtual void | removeConfigurable (Configurable *conf) |
| | Removes a configurable as a child object. More...
|
| |
| virtual const configurableList & | getConfigurables () const |
| | Returns the list containing all configurable children. More...
|
| |
| virtual void | configurableChanged () |
| | Indicates that the configurable itself or the configurable children attached to this configurable have changed. More...
|
| |
| | BackCaller () |
| |
| virtual | ~BackCaller () |
| |
| virtual void | addCallbackable (Callbackable *callbackableInstance, CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| | Adds a Callbackable instance to this caller instance. More...
|
| |
| virtual void | removeCallbackable (Callbackable *callbackableInstance, CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| | Removes a Callbackable instance from this caller instance. More...
|
| |
| virtual void | removeAllCallbackables (CallbackableType type) |
| | Removes all Callbackable instances from this caller instance. More...
|
| |
| virtual void | callBack (CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| | Calls all registered callbackable classes of the determined type. More...
|
| |
| virtual void | callBackQMP (CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| | Calls all registered callbackable classes of the determined type. More...
|
| |
| | Inspectable (const iparamkey &name="") |
| | TYPEDEFS END. More...
|
| |
| virtual | ~Inspectable () |
| |
| virtual iparamkeylist | getInternalParamNames () const |
| | The list of the names of all internal parameters given by getInternalParams(). More...
|
| |
| virtual iparamvallist | getInternalParams () const |
| |
| virtual iparamvalptrlist | getInternalParamsPtr () const |
| | be careful: matrices will be ignored More...
|
| |
| virtual ilayerlist | getStructuralLayers () const |
| | Specifies which parameter vector forms a structural layer (in terms of a neural network) The ordering is important. More...
|
| |
| virtual iconnectionlist | getStructuralConnections () const |
| | Specifies which parameter matrix forms a connection between layers (in terms of a neural network) The orderning is not important. More...
|
| |
| virtual void | addInspectableValue (const iparamkey &key, iparamval const *val, const std::string &descr=std::string()) |
| | This is the new style for adding inspectable values. More...
|
| |
| virtual void | addInspectableMatrix (const iparamkey &key, const matrix::Matrix *m, bool only4x4AndDiag=true, const std::string &descr=std::string()) |
| | This is the new style for adding inspectable values. More...
|
| |
| virtual void | addInspectableDescription (const iparamkey &key, const std::string &descr) |
| | adds a description for the given parameter using info-lines The line will start (appart from the #I) with a D for description followed by the key end then followed by the string. More...
|
| |
| virtual void | addInfoLine (std::string infoLine) |
| | Adds an info line to this inspectable instance. More...
|
| |
| virtual void | addInfoLines (std::list< std::string > infoLineList) |
| | Adds a bunch of infolines with addInfoLine to this inspectable instance. More...
|
| |
| virtual void | removeInfoLines () |
| | Removes all infolines from this inspectable instance. More...
|
| |
| virtual const infoLinesList & | getInfoLines () const |
| | Returns all infolines added to this inspectable instance. More...
|
| |
| virtual void | addInspectable (Inspectable *insp) |
| | Adds an inspectable as a child object. More...
|
| |
| virtual void | removeInspectable (Inspectable *insp) |
| | Removes an inspectable as a child object. More...
|
| |
| virtual void | setNameOfInspectable (const iparamkey &name) |
| | set the name of the inspectable More...
|
| |
| virtual const iparamkey | getNameOfInspectable () const |
| | return the name of the inspectable, getName() would conflict with Configurable::getName() too often More...
|
| |
| virtual const inspectableList & | getInspectables () const |
| | Returns the list containing all inspectable children. More...
|
| |
| virtual | ~Storeable () |
| |
| bool | storeToFile (const char *filename) const |
| | Provided for convenience. More...
|
| |
| bool | restoreFromFile (const char *filename) |
| | Provided for convenience. More...
|
| |
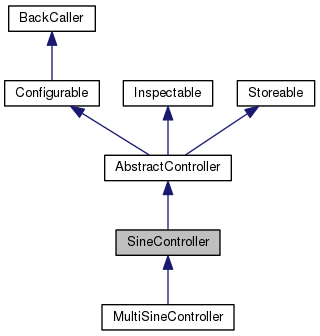
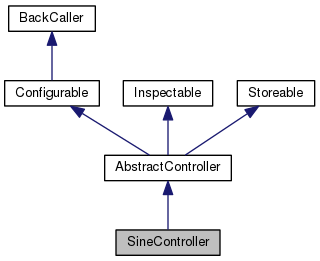
class for robot control with sine, sawtooth and impuls
period is the length of the period in steps and phaseshift is the phase difference between channels given in Pi/2
 Public Types inherited from AbstractController
Public Types inherited from AbstractController 1.8.6
1.8.6 
