This is a controller who is passive at the moment, that means, he will not generate any motor values.
More...
|
| | MutualInformationController (int sensorIntervalCount, double minSensorValue=-1, double maxSensorValue=1, bool showF=false, bool showP=false, bool showXsiF=false) |
| | Constructs the mutual information controller. More...
|
| |
| virtual | ~MutualInformationController () |
| |
| virtual double & | getMI (int index) |
| |
| virtual double & | getH_x (int index) |
| |
| virtual double & | getH_yx (int index) |
| |
| virtual double & | getH_Xsi (int index) |
| |
| virtual void | setAandCandCalcH_xsi (double ainit, double cinit) |
| | we like to calculate the entropy of the xsi, therefore we need for the (self calculated) update rule x_t+1=-a * tanh(c * x_t) the a and c, which should be set in the main.cpp. More...
|
| |
| virtual void | init (int sensornumber, int motornumber, RandGen *randGen=0) |
| | initialisation of the controller with the given sensor/ motornumber Must NORMALLY be called before use. More...
|
| |
| virtual int | getSensorNumber () const |
| |
| virtual int | getMotorNumber () const |
| |
| virtual void | step (const sensor *sensors, int sensornumber, motor *motors, int motornumber) |
| | performs one step (includes learning). More...
|
| |
| virtual void | stepNoLearning (const sensor *sensors, int sensornumber, motor *motors, int motornumber) |
| | performs one step without learning. More...
|
| |
| virtual bool | store (FILE *f) const |
| | The list of the names of all internal parameters given by getInternalParams(). More...
|
| |
| virtual bool | restore (FILE *f) |
| | loads the object from the given file stream (binary). More...
|
| |
| | AbstractController (const std::string &name, const std::string &revision) |
| | contructor (hint: use $ID$ for revision) More...
|
| |
| virtual void | motorBabblingStep (const sensor *, int number_sensors, const motor *, int number_motors) |
| | called in motor babbling phase. More...
|
| |
| virtual void | sensorInfos (std::list< SensorMotorInfo > sensorInfos) |
| | the controller is notified about the information on sensor. More...
|
| |
| virtual void | motorInfos (std::list< SensorMotorInfo > motorInfos) |
| | the controller is notified about the information on motors. More...
|
| |
| virtual int | SIdx (const std::string &name) |
| | returns the index of the sensor with the given name (if not found then 0 and all sensor names are printed) More...
|
| |
| virtual int | MIdx (const std::string &name) |
| | returns the index of the motor with the given name (if not found then 0 and all motor names are printed) More...
|
| |
| virtual SensorMotorInfo | SInfo (int index) |
| | returns the Information for the sensor with given index More...
|
| |
| virtual SensorMotorInfo | MInfo (int index) |
| | returns the Information for the motor with given index More...
|
| |
| | Configurable () |
| |
| | Configurable (const std::string &name, const std::string &revision) |
| | intialise with name and revision (use "$ID$") More...
|
| |
| virtual | ~Configurable () |
| |
| virtual void | notifyOnChange (const paramkey &key) |
| | Is called when a parameter was changes via setParam(). More...
|
| |
| virtual void | addParameter (const paramkey &key, paramval *val, paramval minBound, paramval maxBound, const paramdescr &descr=paramdescr()) |
| | This is the new style for adding configurable parameters. More...
|
| |
| virtual void | addParameter (const paramkey &key, paramval *val, const paramdescr &descr=paramdescr()) |
| | See addParameter(const paramkey& key, paramval* val, paramval minBound, paramval maxBound, const paramdescr& descr) More...
|
| |
| virtual void | addParameter (const paramkey &key, parambool *val, const paramdescr &descr=paramdescr()) |
| | See addParameter(const paramkey& key, paramval* val) but for bool values. More...
|
| |
| virtual void | addParameter (const paramkey &key, paramint *val, paramint minBound, paramint maxBound, const paramdescr &descr=paramdescr()) |
| | See addParameter(const paramkey& key, paramval* val) but for int values. More...
|
| |
| virtual void | addParameter (const paramkey &key, paramint *val, const paramdescr &descr=paramdescr()) |
| |
| virtual void | addParameterDef (const paramkey &key, paramval *val, paramval def, paramval minBound, paramval maxBound, const paramdescr &descr=paramdescr()) |
| | This function is only provided for convenience. More...
|
| |
| virtual void | addParameterDef (const paramkey &key, paramval *val, paramval def, const paramdescr &descr=paramdescr()) |
| |
| virtual void | addParameterDef (const paramkey &key, parambool *val, parambool def, const paramdescr &descr=paramdescr()) |
| | See addParameterDef(const paramkey&, paramval*, paramval) More...
|
| |
| virtual void | addParameterDef (const paramkey &key, paramint *val, paramint def, paramint minBound, paramint maxBound, const paramdescr &descr=paramdescr()) |
| | See addParameterDef(const paramkey&, paramval*, paramval) More...
|
| |
| virtual void | addParameterDef (const paramkey &key, paramint *val, paramint def, const paramdescr &descr=paramdescr()) |
| |
| virtual void | setParamDescr (const paramkey &key, const paramdescr &descr, bool traverseChildren=true) |
| | sets a description for the given parameter More...
|
| |
| int | getId () const |
| | return the id of the configurable objects, which is created by random on initialisation More...
|
| |
| virtual paramkey | getName () const |
| | return the name of the object More...
|
| |
| virtual paramkey | getRevision () const |
| | returns the revision of the object More...
|
| |
| virtual void | setName (const paramkey &name, bool callSetNameOfInspectable=true) |
| | Sets the name of the configurable. More...
|
| |
| virtual void | setRevision (const paramkey &revision) |
| | sets the revision Hint: { return "$ID$"; } More...
|
| |
| virtual paramval | getParam (const paramkey &key, bool traverseChildren=true) const |
| | returns the value of the requested parameter or 0 (+ error message to stderr) if unknown. More...
|
| |
| virtual bool | hasParam (const paramkey &key, bool traverseChildren=true) const |
| | Returns if the requested parameter is part of the configurable or their children. More...
|
| |
| virtual bool | setParam (const paramkey &key, paramval val, bool traverseChildren=true) |
| | sets the value of the given parameter or does nothing if unknown. More...
|
| |
| virtual void | setParamBounds (const paramkey &key, paramval minBound, paramval maxBound, bool traverseChildren=true) |
| | Sets the bounds (minBound and maxBound) of the given parameter. More...
|
| |
| virtual void | setParamBounds (const paramkey &key, paramint minBound, paramint maxBound, bool traverseChildren=true) |
| |
| virtual void | setParamBounds (const paramkey &key, paramvalBounds bounds, bool traverseChildren=true) |
| |
| virtual void | setParamBounds (const paramkey &key, paramintBounds bounds, bool traverseChildren=true) |
| |
| virtual paramlist | getParamList () const |
| | The list of all parameters with there value as allocated lists. More...
|
| |
| virtual std::list< paramkey > | getAllParamNames (bool traverseChildren=true) |
| | returns all names that are configureable More...
|
| |
| virtual parammap | getParamValMap () const |
| |
| virtual paramintmap | getParamIntMap () const |
| |
| virtual paramboolmap | getParamBoolMap () const |
| |
| virtual paramdescr | getParamDescr (const paramkey &key, bool traverseChildren=true) const |
| | returns the description for the given parameter More...
|
| |
| virtual paramvalBounds | getParamvalBounds (const paramkey &key, bool traverseChildren=true) const |
| |
| virtual paramintBounds | getParamintBounds (const paramkey &key, bool traverseChildren=true) const |
| |
| virtual bool | hasParamDescr (const paramkey &key, bool traverseChildren=true) const |
| |
| virtual bool | hasParamvalBounds (const paramkey &key, bool traverseChildren=true) const |
| |
| virtual bool | hasParamintBounds (const paramkey &key, bool traverseChildren=true) const |
| |
| virtual bool | storeCfg (const char *filenamestem, const std::list< std::string > &comments=std::list< std::string >()) |
| | stores the key values paires into the file : filenamestem.cfg including the comments given in the list More...
|
| |
| virtual bool | restoreCfg (const char *filenamestem) |
| | restores the key values paires from the file : filenamestem.cfg More...
|
| |
| void | print (FILE *f, const char *prefix, int columns=90, bool traverseChildren=true) const |
| | prints the keys, values and descriptions to the file. Each line is prefixed More...
|
| |
| bool | parse (FILE *f, const char *prefix=0, bool traverseChildren=true) |
| | parses the configuration from the given file More...
|
| |
| virtual void | addConfigurable (Configurable *conf) |
| | Adds a configurable as a child object. More...
|
| |
| virtual void | removeConfigurable (Configurable *conf) |
| | Removes a configurable as a child object. More...
|
| |
| virtual const configurableList & | getConfigurables () const |
| | Returns the list containing all configurable children. More...
|
| |
| virtual void | configurableChanged () |
| | Indicates that the configurable itself or the configurable children attached to this configurable have changed. More...
|
| |
| | BackCaller () |
| |
| virtual | ~BackCaller () |
| |
| virtual void | addCallbackable (Callbackable *callbackableInstance, CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| | Adds a Callbackable instance to this caller instance. More...
|
| |
| virtual void | removeCallbackable (Callbackable *callbackableInstance, CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| | Removes a Callbackable instance from this caller instance. More...
|
| |
| virtual void | removeAllCallbackables (CallbackableType type) |
| | Removes all Callbackable instances from this caller instance. More...
|
| |
| virtual void | callBack (CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| | Calls all registered callbackable classes of the determined type. More...
|
| |
| virtual void | callBackQMP (CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| | Calls all registered callbackable classes of the determined type. More...
|
| |
| | Inspectable (const iparamkey &name="") |
| | TYPEDEFS END. More...
|
| |
| virtual | ~Inspectable () |
| |
| virtual iparamkeylist | getInternalParamNames () const |
| | The list of the names of all internal parameters given by getInternalParams(). More...
|
| |
| virtual iparamvallist | getInternalParams () const |
| |
| virtual iparamvalptrlist | getInternalParamsPtr () const |
| | be careful: matrices will be ignored More...
|
| |
| virtual ilayerlist | getStructuralLayers () const |
| | Specifies which parameter vector forms a structural layer (in terms of a neural network) The ordering is important. More...
|
| |
| virtual iconnectionlist | getStructuralConnections () const |
| | Specifies which parameter matrix forms a connection between layers (in terms of a neural network) The orderning is not important. More...
|
| |
| virtual void | addInspectableValue (const iparamkey &key, iparamval const *val, const std::string &descr=std::string()) |
| | This is the new style for adding inspectable values. More...
|
| |
| virtual void | addInspectableMatrix (const iparamkey &key, const matrix::Matrix *m, bool only4x4AndDiag=true, const std::string &descr=std::string()) |
| | This is the new style for adding inspectable values. More...
|
| |
| virtual void | addInspectableDescription (const iparamkey &key, const std::string &descr) |
| | adds a description for the given parameter using info-lines The line will start (appart from the #I) with a D for description followed by the key end then followed by the string. More...
|
| |
| virtual void | addInfoLine (std::string infoLine) |
| | Adds an info line to this inspectable instance. More...
|
| |
| virtual void | addInfoLines (std::list< std::string > infoLineList) |
| | Adds a bunch of infolines with addInfoLine to this inspectable instance. More...
|
| |
| virtual void | removeInfoLines () |
| | Removes all infolines from this inspectable instance. More...
|
| |
| virtual const infoLinesList & | getInfoLines () const |
| | Returns all infolines added to this inspectable instance. More...
|
| |
| virtual void | addInspectable (Inspectable *insp) |
| | Adds an inspectable as a child object. More...
|
| |
| virtual void | removeInspectable (Inspectable *insp) |
| | Removes an inspectable as a child object. More...
|
| |
| virtual void | setNameOfInspectable (const iparamkey &name) |
| | set the name of the inspectable More...
|
| |
| virtual const iparamkey | getNameOfInspectable () const |
| | return the name of the inspectable, getName() would conflict with Configurable::getName() too often More...
|
| |
| virtual const inspectableList & | getInspectables () const |
| | Returns the list containing all inspectable children. More...
|
| |
| virtual | ~Storeable () |
| |
| bool | storeToFile (const char *filename) const |
| | Provided for convenience. More...
|
| |
| bool | restoreFromFile (const char *filename) |
| | Provided for convenience. More...
|
| |
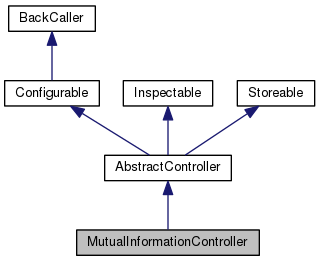
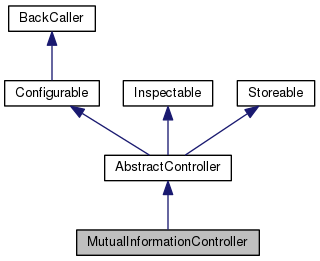
This is a controller who is passive at the moment, that means, he will not generate any motor values.
This controller calculates the mutual information from one to the next time step. Note that many steps are necessary for a good prediction of the mutual information.
 Public Member Functions inherited from AbstractController
Public Member Functions inherited from AbstractController 1.8.6
1.8.6 
