#include <primitivecomponent.h>
Inherits Component.
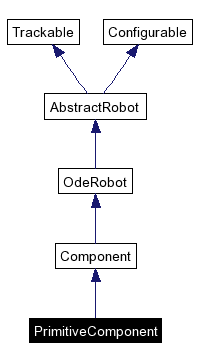
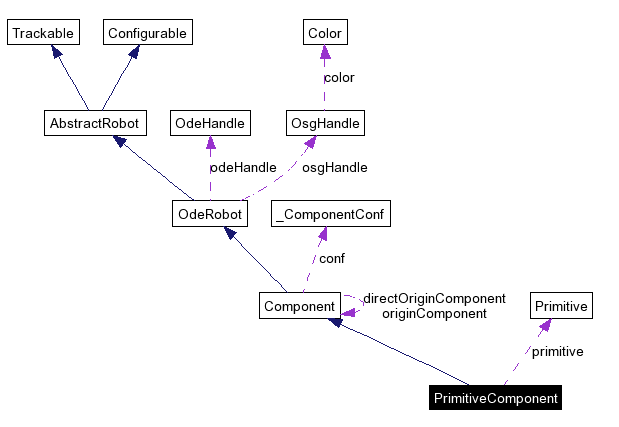
Inheritance diagram for PrimitiveComponent:
Public Member Functions | |
| PrimitiveComponent (Primitive *p, const OdeHandle &odeHandle, const OsgHandle &osgHandle, const ComponentConf &conf) | |
| ~PrimitiveComponent () | |
| virtual void | update () |
| update the OSG notes here | |
| virtual void | place (const Pos &pos) |
| sets the vehicle to position pos | |
| virtual void | place (const osg:Matrix &) |
| virtual Position | getPosition () const |
| returns position of the object | |
| virtual Primitive * | getMainPrimitive () const |
| return reference to the simple Primitive, or to the main Primitive of the robot assigend to the component. | |
Protected Attributes | |
| Primitive * | primitive |
|
||||||||||||||||||||
|
|
|
|
|
|
|
return reference to the simple Primitive, or to the main Primitive of the robot assigend to the component. If nothimng is assigned, NULL is returned. Implements Component.
|
|
|
returns position of the object
Implements Component.
|
|
|
|
|
|
sets the vehicle to position pos
Implements Component.
|
|
|
update the OSG notes here
Implements Component.
|
|
|
|
 1.3.8
1.3.8