#include <proactive2.h>
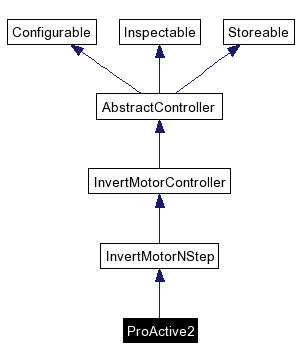
Inherits InvertMotorNStep.
Inheritance diagram for ProActive2:
Public Member Functions | |
| ProActive2 (unsigned int numberNonContext, unsigned int tau, const InvertMotorNStepConf &conf=getDefaultConf()) | |
| virtual | ~ProActive2 () |
| virtual void | init (int sensornumber, int motornumber) |
| initialisation of the controller with the given sensor/ motornumber Must be called before use. | |
| virtual void | step (const sensor *x_, int number_sensors, motor *y_, int number_motors) |
| performs one step (includes learning). | |
| virtual void | stepNoLearning (const sensor *x_, int number_sensors, motor *y_, int number_motors) |
| performs one step without learning. Calulates motor commands from sensor inputs. | |
| virtual paramkey | getName () const |
| return the name of the object (with version number) Hint: use insertCVSInfo from Configurable | |
| virtual list< iparamkey > | getInternalParamNames () const |
| The list of the names of all internal parameters given by getInternalParams(). | |
| virtual list< iparamval > | getInternalParams () const |
| virtual paramval | getParam (const paramkey &key) const |
| returns the value of the requested parameter or 0 (+ error message to stderr) if unknown. | |
| virtual bool | setParam (const paramkey &key, paramval val) |
| sets the value of the given parameter or does nothing if unknown. | |
| virtual paramlist | getParamList () const |
| The list of all parameters with there value as allocated lists. | |
Static Public Member Functions | |
| InvertMotorNStepConf | getDefaultConf () |
Protected Member Functions | |
| virtual void | bufferSynDynInput () |
| virtual void | calcXsi (int delay) |
| calculates xsi for the current time step using the delayed y values | |
Protected Attributes | |
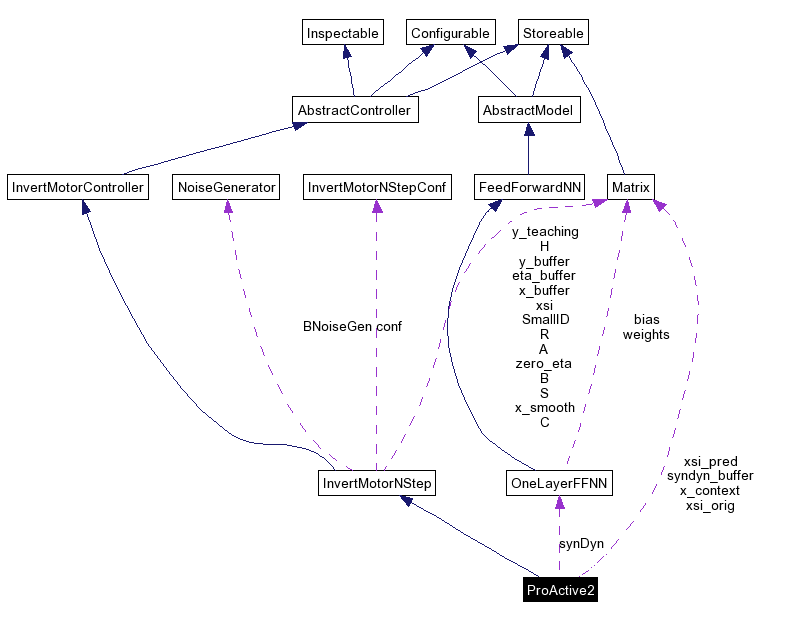
| OneLayerFFNN | synDyn |
| matrix::Matrix * | syndyn_buffer |
| matrix::Matrix | x_context |
| matrix::Matrix | xsi_pred |
| matrix::Matrix | xsi_orig |
| paramkey * | internkeylist |
| unsigned int | tau |
| unsigned int | numberNonContext |
| unsigned int | number_all_sensors |
| double | dampH |
| double | epsH |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
calculates xsi for the current time step using the delayed y values
Reimplemented from InvertMotorNStep.
|
|
|
Reimplemented from InvertMotorNStep.
|
|
|
The list of the names of all internal parameters given by getInternalParams(). The naming convention is "v[i]" for vectors and "A[i][j]" for matrices, where i, j start at 0.
Reimplemented from InvertMotorNStep.
|
|
|
Reimplemented from InvertMotorNStep.
|
|
|
return the name of the object (with version number) Hint: use insertCVSInfo from Configurable
Reimplemented from Configurable.
|
|
|
returns the value of the requested parameter or 0 (+ error message to stderr) if unknown.
Reimplemented from InvertMotorController.
|
|
|
The list of all parameters with there value as allocated lists.
Reimplemented from InvertMotorController.
|
|
||||||||||||
|
initialisation of the controller with the given sensor/ motornumber Must be called before use.
Reimplemented from InvertMotorNStep.
|
|
||||||||||||
|
sets the value of the given parameter or does nothing if unknown.
Reimplemented from InvertMotorController.
|
|
||||||||||||||||||||
|
performs one step (includes learning). Calulates motor commands from sensor inputs. Reimplemented from InvertMotorNStep.
|
|
||||||||||||||||||||
|
performs one step without learning. Calulates motor commands from sensor inputs.
Reimplemented from InvertMotorNStep.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 1.3.8
1.3.8