#include <abstractcontroller.h>
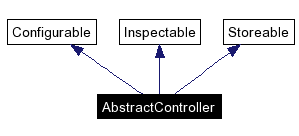
Inherits Configurable, Inspectable, and Storeable.
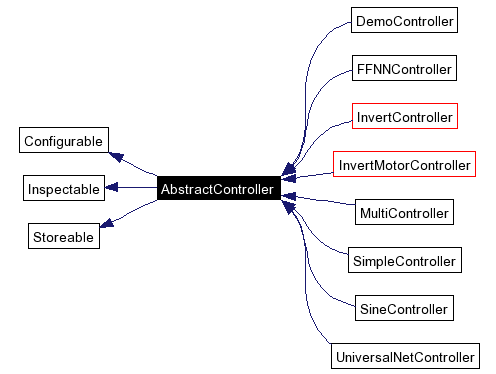
Inherited by DemoController, FFNNController, InvertController, InvertMotorController, MultiController, SimpleController, SineController, and UniversalNetController.
Inheritance diagram for AbstractController:
Public Member Functions | |
| AbstractController (const std::string &name, const std::string &revision) | |
| contructor (hint: use $ID$ for revision) | |
| virtual void | init (int sensornumber, int motornumber) ABSTRACT |
| initialisation of the controller with the given sensor/ motornumber Must be called before use. | |
| virtual int | getSensorNumber () const ABSTRACT |
| virtual int | getMotorNumber () const ABSTRACT |
| virtual void | step (const sensor *sensors, int sensornumber, motor *motors, int motornumber) ABSTRACT |
| performs one step (includes learning). | |
| virtual void | stepNoLearning (const sensor *, int number_sensors, motor *, int number_motors) ABSTRACT |
| performs one step without learning. | |
The controller gets a number of input sensor values each timestep and has to generate a number of output motor values.
Interface assumes the following usage:
directconnect/directconnect.cpp, integration/main.cpp, and main.cpp.
|
||||||||||||
|
contructor (hint: use $ID$ for revision)
|
|
|
Reimplemented in DerController, FFNNController, InvertMotorBigModel, InvertMotorNStep, InvertMotorSpace, InvertNChannelController, SineController, DemoController, MultiController, and SimpleController.
|
|
|
Reimplemented in DerController, FFNNController, InvertMotorBigModel, InvertMotorNStep, InvertMotorSpace, InvertNChannelController, SineController, DemoController, MultiController, and SimpleController.
|
|
||||||||||||
|
initialisation of the controller with the given sensor/ motornumber Must be called before use.
Reimplemented in DerController, DInvert3ChannelController, FFNNController, InvertMotorBigModel, InvertMotorNStep, InvertMotorSpace, InvertNChannelController, ProActive, ProActive2, SineController, DemoController, MultiController, and SimpleController.
|
|
||||||||||||||||||||
|
performs one step (includes learning). Calculates motor commands from sensor inputs.
Reimplemented in DerController, DInvert3ChannelController, FFNNController, Invert3ChannelController, InvertMotorBigModel, InvertMotorNStep, InvertMotorSpace, InvertNChannelController, ProActive, ProActive2, SineController, DemoController, MultiController, and SimpleController.
|
|
||||||||||||||||||||
|
performs one step without learning.
Reimplemented in DerController, DInvert3ChannelController, FFNNController, Invert3ChannelController, InvertMotorBigModel, InvertMotorNStep, InvertMotorSpace, InvertNChannelController, ProActive, ProActive2, SineController, DemoController, MultiController, and SimpleController.
|
 1.3.8
1.3.8