#include <invertnchannelcontroller_gnu.h>
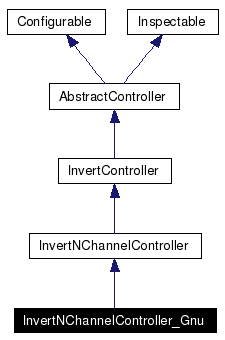
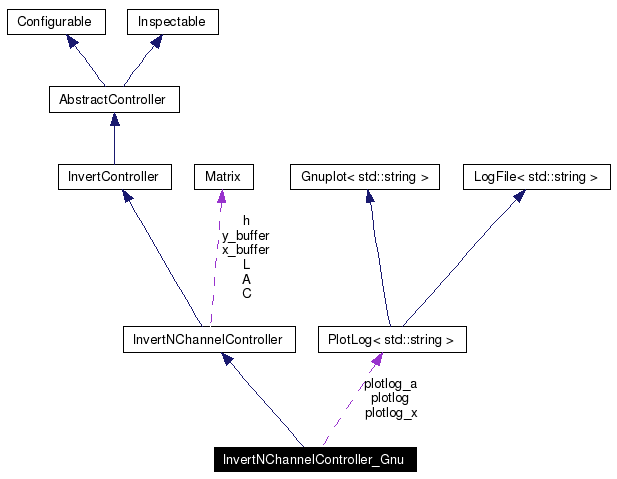
Inheritance diagram for InvertNChannelController_Gnu:
Implements standart parameters: eps, rho, mu, stepnumber4avg, stepnumber4delay
Definition at line 30 of file invertnchannelcontroller_gnu.h.
Public Member Functions | |
| InvertNChannelController_Gnu (int _number_channels, int _buffersize) | |
| virtual | ~InvertNChannelController_Gnu () |
| virtual void | step (const sensor *, int number_sensors, motor *, int number_motors) |
| performs one step (includes learning). | |
| virtual void | stepNoLearning (const sensor *, int number_sensors, motor *, int number_motors) |
| performs one step without learning. Calulates motor commands from sensor inputs. | |
Protected Member Functions | |
| virtual void | plot (const sensor *x, const motor *y) |
| plotting sensorvalues x, motorvalues y, matrix A, matrix C and vector h | |
| std::string | intToStr (int value) |
| converts integer to string | |
Protected Attributes | |
| PlotLog< std::string > | plotlog |
| PlotLog< std::string > | plotlog_x |
| PlotLog< std::string > | plotlog_a |
|
||||||||||||
|
Definition at line 24 of file invertnchannelcontroller_gnu.hpp. |
|
|
Definition at line 35 of file invertnchannelcontroller_gnu.h. |
|
|
converts integer to string
Definition at line 104 of file invertnchannelcontroller_gnu.hpp. |
|
||||||||||||
|
plotting sensorvalues x, motorvalues y, matrix A, matrix C and vector h
Definition at line 52 of file invertnchannelcontroller_gnu.hpp. |
|
||||||||||||||||||||
|
performs one step (includes learning). Calulates motor commands from sensor inputs. Reimplemented from InvertNChannelController. Definition at line 82 of file invertnchannelcontroller_gnu.hpp. |
|
||||||||||||||||||||
|
performs one step without learning. Calulates motor commands from sensor inputs.
Reimplemented from InvertNChannelController. Definition at line 94 of file invertnchannelcontroller_gnu.hpp. |
|
|
Definition at line 51 of file invertnchannelcontroller_gnu.h. |
|
|
Definition at line 53 of file invertnchannelcontroller_gnu.h. |
|
|
Definition at line 52 of file invertnchannelcontroller_gnu.h. |
 1.4.5
1.4.5