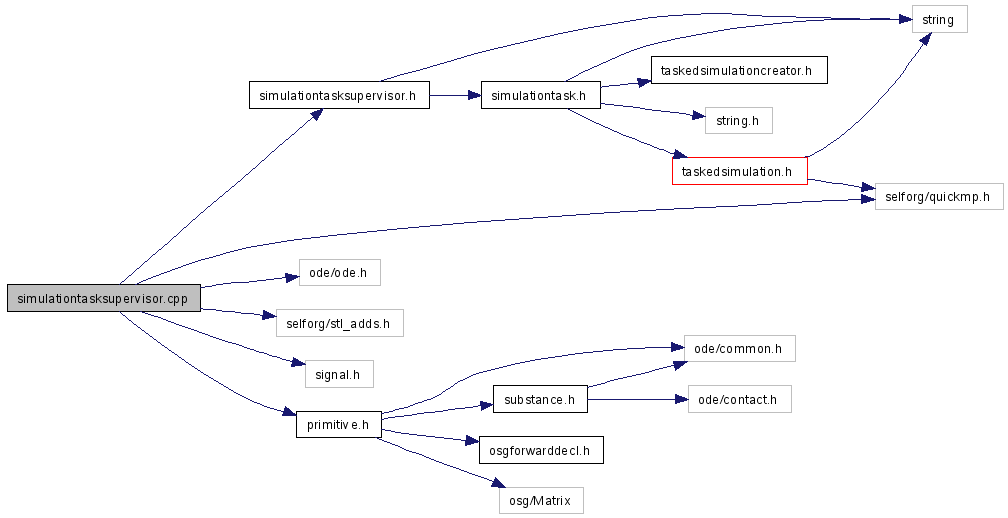
#include "simulationtasksupervisor.h"#include <selforg/quickmp.h>#include <ode/ode.h>#include <selforg/stl_adds.h>#include <signal.h>#include <primitive.h>Include dependency graph for simulationtasksupervisor.cpp:
Namespaces | |
| namespace | lpzrobots |
Defines | |
| #define | QP(x) |
| #define QP | ( | x | ) |
 1.4.7
1.4.7