#include <joint.h>
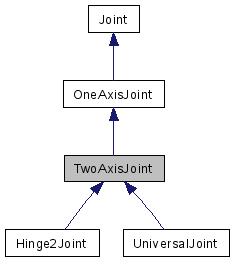
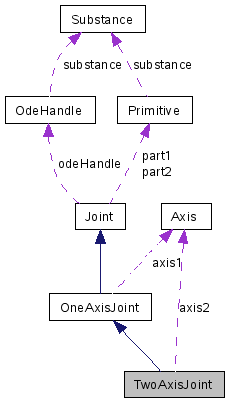
Inherits OneAxisJoint.
Inherited by Hinge2Joint, and UniversalJoint.
Inheritance diagram for TwoAxisJoint:
Public Member Functions | |
| TwoAxisJoint (Primitive *part1, Primitive *part2, const osg::Vec3 &anchor, const Axis axis1, const Axis axis2) | |
| virtual Axis | getAxis2 () const |
| virtual double | getPosition2 () const =0 |
| virtual double | getPosition2Rate () const =0 |
| virtual void | addForce2 (double force)=0 |
| void | addForces (double force1, double force2) |
| virtual int | getNumberAxes () const |
| returns the number of Axes | |
| virtual std::list< double > | getPositions () const |
| returns the positions of all Axes | |
| virtual std::list< double > | getPositionRates () const |
| returns the position rates of all Axes | |
| virtual int | getPositions (double *sensorarray) const |
| stores the positions of all Axes into sensorarray and returns the number of written entries | |
| virtual int | getPositionRates (double *sensorarray) const |
| stores the position rates of all Axes into sensorarray and returns the number of written entries | |
Protected Attributes | |
| Axis | axis2 |
| TwoAxisJoint | ( | Primitive * | part1, | |
| Primitive * | part2, | |||
| const osg::Vec3 & | anchor, | |||
| const Axis | axis1, | |||
| const Axis | axis2 | |||
| ) | [inline] |
| virtual void addForce2 | ( | double | force | ) | [pure virtual] |
Implemented in Hinge2Joint, and UniversalJoint.
| void addForces | ( | double | force1, | |
| double | force2 | |||
| ) | [inline] |
| virtual Axis getAxis2 | ( | ) | const [inline, virtual] |
| virtual int getNumberAxes | ( | ) | const [inline, virtual] |
| virtual double getPosition2 | ( | ) | const [pure virtual] |
Implemented in Hinge2Joint, and UniversalJoint.
| virtual double getPosition2Rate | ( | ) | const [pure virtual] |
Implemented in Hinge2Joint, and UniversalJoint.
| int getPositionRates | ( | double * | sensorarray | ) | const [virtual] |
stores the position rates of all Axes into sensorarray and returns the number of written entries
Reimplemented from OneAxisJoint.
| std::list< double > getPositionRates | ( | ) | const [virtual] |
| int getPositions | ( | double * | sensorarray | ) | const [virtual] |
stores the positions of all Axes into sensorarray and returns the number of written entries
Reimplemented from OneAxisJoint.
| std::list< double > getPositions | ( | ) | const [virtual] |
 1.4.7
1.4.7