#include <invertnchannelcontroller.h>
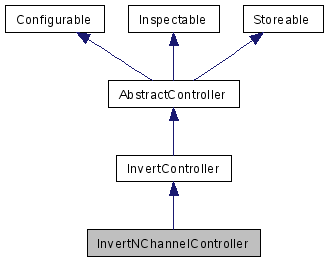
Inherits InvertController.
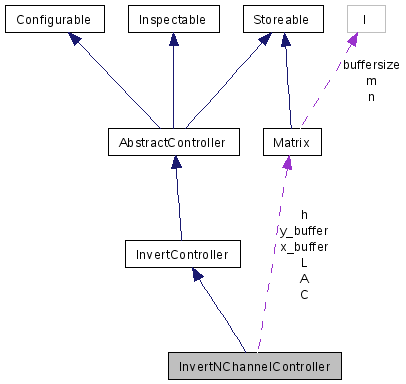
Inheritance diagram for InvertNChannelController:
Public Member Functions | |
| InvertNChannelController (int _buffersize, bool _update_only_1=false) | |
| virtual void | init (int sensornumber, int motornumber, RandGen *randGen=0) |
| initialisation of the controller with the given sensor/ motornumber Must be called before use. | |
| virtual | ~InvertNChannelController () |
| virtual paramkey | getName () const |
| returns the name of the object (with version number) | |
| virtual int | getSensorNumber () const |
| returns the number of sensors the controller was initialised with or 0 if not initialised | |
| virtual int | getMotorNumber () const |
| returns the mumber of motors the controller was initialised with or 0 if not initialised | |
| virtual void | step (const sensor *, int number_sensors, motor *, int number_motors) |
| performs one step (includes learning). | |
| virtual void | stepNoLearning (const sensor *, int number_sensors, motor *, int number_motors) |
| performs one step without learning. Calulates motor commands from sensor inputs. | |
| virtual bool | store (FILE *f) const |
| stores the controller values to a given file. | |
| virtual bool | restore (FILE *f) |
| loads the controller values from a given file. | |
| virtual std::list< ILayer > | getStructuralLayers () const |
| Specifies which parameter vector forms a structural layer (in terms of a neural network) The ordering is important. | |
| virtual std::list< IConnection > | getStructuralConnections () const |
| Specifies which parameter matrix forms a connection between layers (in terms of a neural network) The orderning is not important. | |
Protected Member Functions | |
| virtual double | calculateE (const matrix::Matrix &x_delay, const matrix::Matrix &y_delay) |
| virtual void | learn (const matrix::Matrix &x_delay, const matrix::Matrix &y_delay) |
| learn values h,C | |
| virtual void | learnmodel (const matrix::Matrix &y_delay) |
| virtual matrix::Matrix | calculateDelayedValues (const matrix::Matrix *buffer, unsigned int number_steps_of_delay_) |
| calculate delayed values | |
| virtual matrix::Matrix | calculateSmoothValues (const matrix::Matrix *buffer, unsigned int number_steps_for_averaging_) |
| matrix::Matrix | calculateControllerValues (const matrix::Matrix &x_smooth) |
| calculate controller outputs | |
| void | putInBuffer (matrix::Matrix *buffer, const matrix::Matrix &vec) |
Static Protected Member Functions | |
| static double | g (double z) |
| neuron transfer function | |
| static double | g_s (double z) |
| static double | squash (double z) |
| squashing function, to protect against to large weight updates | |
Protected Attributes | |
| unsigned short | number_channels |
| unsigned short | buffersize |
| bool | update_only_1 |
| matrix::Matrix | A |
| matrix::Matrix | C |
| matrix::Matrix | h |
| matrix::Matrix | L |
| matrix::Matrix * | x_buffer |
| matrix::Matrix * | y_buffer |
| int | t |
| paramkey | name |
Implements standart parameters: eps, rho, mu, stepnumber4avg, stepnumber4delay
| InvertNChannelController | ( | int | _buffersize, | |
| bool | _update_only_1 = false | |||
| ) |
| ~InvertNChannelController | ( | ) | [virtual] |
| Matrix calculateControllerValues | ( | const matrix::Matrix & | x_smooth | ) | [protected] |
calculate controller outputs
| x_smooth | Matrix(number_channels,1) |
| Matrix calculateDelayedValues | ( | const matrix::Matrix * | buffer, | |
| unsigned int | number_steps_of_delay_ | |||
| ) | [protected, virtual] |
calculate delayed values
| double calculateE | ( | const matrix::Matrix & | x_delay, | |
| const matrix::Matrix & | y_delay | |||
| ) | [protected, virtual] |
| Matrix calculateSmoothValues | ( | const matrix::Matrix * | buffer, | |
| unsigned int | number_steps_for_averaging_ | |||
| ) | [protected, virtual] |
| static double g | ( | double | z | ) | [inline, static, protected] |
neuron transfer function
| static double g_s | ( | double | z | ) | [inline, static, protected] |
| virtual int getMotorNumber | ( | ) | const [inline, virtual] |
returns the mumber of motors the controller was initialised with or 0 if not initialised
Implements AbstractController.
| virtual paramkey getName | ( | ) | const [inline, virtual] |
| virtual int getSensorNumber | ( | ) | const [inline, virtual] |
returns the number of sensors the controller was initialised with or 0 if not initialised
Implements AbstractController.
| list< Inspectable::IConnection > getStructuralConnections | ( | ) | const [virtual] |
Specifies which parameter matrix forms a connection between layers (in terms of a neural network) The orderning is not important.
Reimplemented from Inspectable.
| list< Inspectable::ILayer > getStructuralLayers | ( | ) | const [virtual] |
Specifies which parameter vector forms a structural layer (in terms of a neural network) The ordering is important.
The first entry is the input layer and so on.
Reimplemented from Inspectable.
| void init | ( | int | sensornumber, | |
| int | motornumber, | |||
| RandGen * | randGen = 0 | |||
| ) | [virtual] |
initialisation of the controller with the given sensor/ motornumber Must be called before use.
The random generator is optional.
Implements AbstractController.
| void learn | ( | const matrix::Matrix & | x_delay, | |
| const matrix::Matrix & | y_delay | |||
| ) | [protected, virtual] |
learn values h,C
| void learnmodel | ( | const matrix::Matrix & | y_delay | ) | [protected, virtual] |
| void putInBuffer | ( | matrix::Matrix * | buffer, | |
| const matrix::Matrix & | vec | |||
| ) | [protected] |
| bool restore | ( | FILE * | f | ) | [virtual] |
| static double squash | ( | double | z | ) | [inline, static, protected] |
squashing function, to protect against to large weight updates
performs one step (includes learning).
Calulates motor commands from sensor inputs.
Implements AbstractController.
performs one step without learning. Calulates motor commands from sensor inputs.
Implements AbstractController.
| bool store | ( | FILE * | f | ) | const [virtual] |
matrix::Matrix A [protected] |
unsigned short buffersize [protected] |
matrix::Matrix C [protected] |
matrix::Matrix h [protected] |
matrix::Matrix L [protected] |
Reimplemented from Configurable.
unsigned short number_channels [protected] |
int t [protected] |
bool update_only_1 [protected] |
matrix::Matrix* x_buffer [protected] |
matrix::Matrix* y_buffer [protected] |
 1.4.7
1.4.7