#include <complexmeasure.h>
Inherits AbstractMeasure.
Inherited by TrackableMeasure.
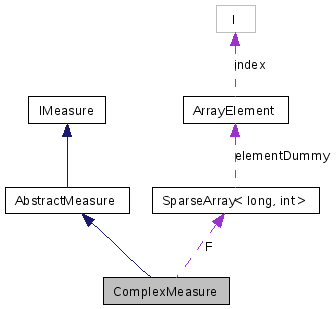
Inheritance diagram for ComplexMeasure:
Public Member Functions | |
| ComplexMeasure (const char *measureName, ComplexMeasureMode mode, int numberBins) | |
| creates a new complex measure. | |
| virtual void | addObservable (double &observedValue, double minValue, double maxValue) |
| adds a observed variable to the measure. | |
| virtual | ~ComplexMeasure () |
| virtual void | step () |
| defined by AbstractMeasure. | |
Protected Member Functions | |
| void | calculatePInf () |
| calculates the Predictive Information | |
| void | updateEntropy (int binNumber) |
| updates the entropy. | |
| void | computeEntropy () |
| computes the entropy. | |
| void | initF () |
| inits F, neccessary after each call of addObservable() | |
Protected Attributes | |
| std::list< double * > | observedValueList |
| std::list< Discretisizer * > | discretisizerList |
| ComplexMeasureMode | mode |
| int | numberBins |
| long | fSize |
| int | historySize |
| int * | binNumberHistory |
| int | historyIndex |
| int * | historyIndexList |
| int | historyIndexNumber |
| int | historyInterval |
| matrix::SparseArray< long, int > | F |
| ComplexMeasure | ( | const char * | measureName, | |
| ComplexMeasureMode | mode, | |||
| int | numberBins | |||
| ) |
creates a new complex measure.
the calculated things are such like mutual information, entropy, joint entropy and so on. it`s possible to add new ones, see above for the ComplexMeasureModes. Don"t forget! to add observed values! with the method
| measureName | the name of the measure, needed for PlotOptions and HUDSM | |
| mode | the measure you like to have | |
| numberBins | in earlier versions named as intervalCount. For complex measures the observedValue has to be discretisized, this does the ComplexMeasure with the class Discretisizer for you. |
| ~ComplexMeasure | ( | ) | [virtual] |
| void addObservable | ( | double & | observedValue, | |
| double | minValue, | |||
| double | maxValue | |||
| ) | [virtual] |
adds a observed variable to the measure.
| observedValue | address of the observed value | |
| minValue | minimum value the observed value can become | |
| maxValue | maximum value the observed value can become |
| void calculatePInf | ( | ) | [protected] |
calculates the Predictive Information
| void computeEntropy | ( | ) | [protected] |
computes the entropy.
uses the normal rule with O(m*n*o) costs
| void initF | ( | ) | [protected] |
inits F, neccessary after each call of addObservable()
| void step | ( | ) | [virtual] |
defined by AbstractMeasure.
This method is called from StatisticTools for updating the measure in every simStep (ODE).
Implements IMeasure.
Reimplemented in TrackableMeasure.
| void updateEntropy | ( | int | binNumber | ) | [protected] |
updates the entropy.
uses update rule with O(1) costs
| binNumber | the bin number |
int* binNumberHistory [protected] |
std::list<Discretisizer*> discretisizerList [protected] |
matrix::SparseArray<long, int> F [protected] |
long fSize [protected] |
int historyIndex [protected] |
int* historyIndexList [protected] |
int historyIndexNumber [protected] |
int historyInterval [protected] |
int historySize [protected] |
ComplexMeasureMode mode [protected] |
int numberBins [protected] |
std::list<double*> observedValueList [protected] |
 1.4.7
1.4.7