|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
#include "invertcontroller.h"#include "controller_misc.h"#include <assert.h>#include <cmath>#include <selforg/matrix.h>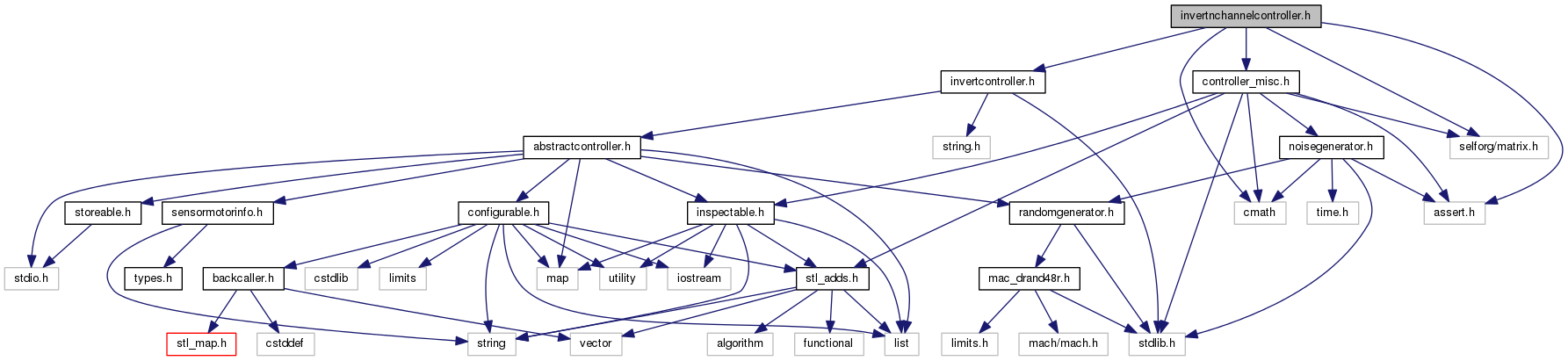
Go to the source code of this file.
Classes | |
| class | InvertNChannelController |
| class for robot controller that uses the georg's matrixlib for direct matrix inversion for n channels (simple one layer networks) More... | |
 1.8.6
1.8.6 
