|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
The selforg directory contains the controller and a small framework to use them in different scenarios.
More...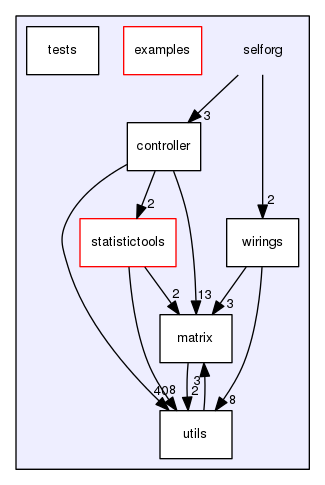
Directories | |
| directory | controller |
| The controller directory contains (as you can guess) the controllers developed in the robotic group of Leipzig University. | |
| directory | examples |
| Examples for the usage of the selforg framework. | |
| directory | matrix |
| directory | statistictools |
| directory | tests |
| directory | utils |
| directory | wirings |
| This file is used for the doxygen documentation. | |
Files | |
| file | abstractrobot.h [code] |
| file | agent.cpp |
| file | agent.h [code] |
| file | selforg/README |
| This file is used for the doxygen documentation. | |
| file | trackable.h [code] |
| file | wiredcontroller.cpp |
| file | wiredcontroller.h [code] |
The selforg directory contains the controller and a small framework to use them in different scenarios.
The class WiredController is a controller together with a wiring that can be connected to a robot. It provides logging and plotting of parameters. The class Agent is a subsumption of a robot, a wired controller. The wiring specifies the connections between the sensor values of the robot and the sensor values of the controller, and also the connection between the motor outputs of the controller and the motor values given to the robot.
The following subdirectories are included:
You have tree options for the usage of the controllers and the framwork. It depends on what you want and what you have. You can either use a controller just as it is (see example directconnect), or use it in the framework of controller and wiring (see example wiredconnect) or all together with an agent (see example integration). In the first two versions you have direct control of the data flow. The last two have the advantage to facilitates you with the plotting options and such like. The integration example is useful for a computer simulation framework. Here the data flow is controlled by the agent, which then asks the robot about the sensors, invokes the controller and sends the motor values the robot again.
Please click on the register tab "Examples" on the top.
 1.8.6
1.8.6 
