|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
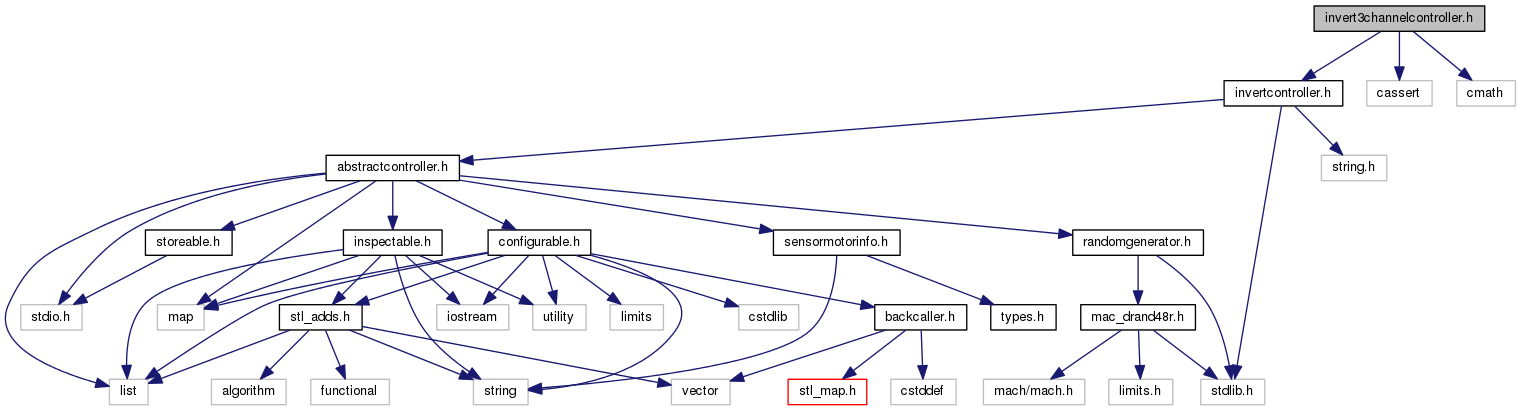
Go to the source code of this file.
Classes | |
| class | Invert3ChannelController< NUMBER_CHANNELS, BUFFER_SIZE > |
| class for robot controller that use naglaa's direct matrix inversion for n channels (simple one layer networks) More... | |
Functions | |
| AbstractController * | getController (int sensornumber, int motornumber, int param1, double param2) |
| AbstractController* getController | ( | int | sensornumber, |
| int | motornumber, | ||
| int | param1, | ||
| double | param2 | ||
| ) |
 1.8.6
1.8.6 
